Unknown environment route planning method of underwater cleaning robot
An operating robot, technology of unknown environment, applied in the field of industrial automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
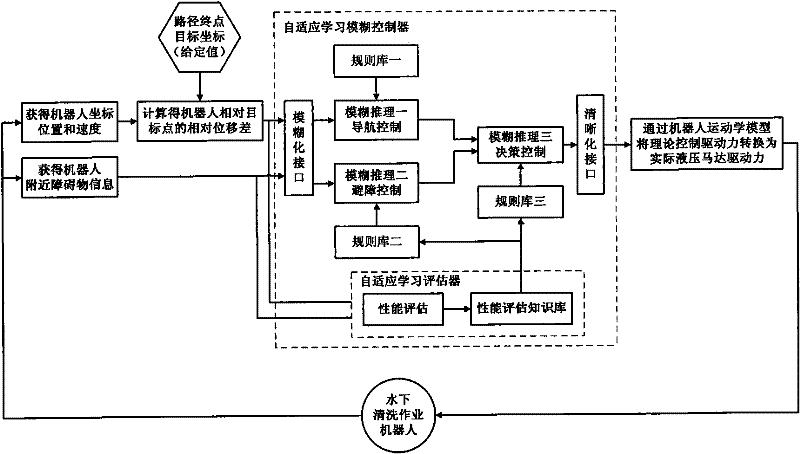
[0066] The overall frame diagram of the technical solution of the present invention is as follows figure 1 As shown, the specific steps are:
[0067] 1) Calculate the current movement speed and position coordinates of the robot by calculating the measured values of the acceleration sensor and the gyroscope angular acceleration sensor, and at the same time detect the distance and azimuth of nearby obstacles through the underwater laser ranging sensor.
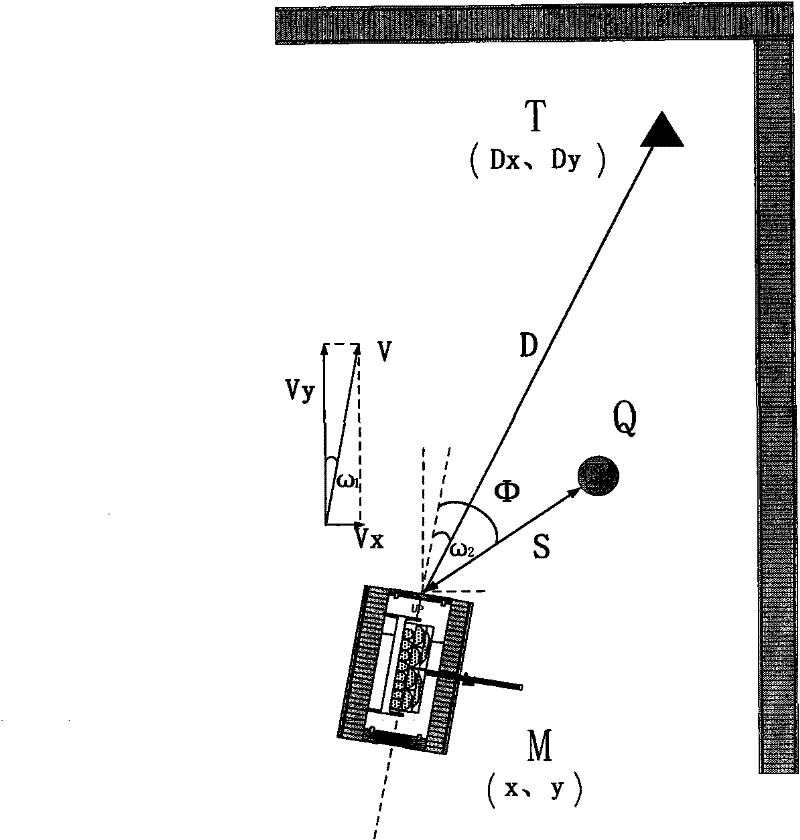
[0068] Because the sliding of the robot in the direction perpendicular to the track wheels is very small and approximately negligible, the motion of the robot can be decomposed into the linear motion of the robot along the direction of the track (front-back direction) and the rotational motion of the vertical axis. Such as figure 2 As shown in (top view), the acceleration sensor and gyro sensor installed on the main body of the robot directly measure the acceleration in the front and rear directions of the robot (forward is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com