

Teleoperation robot adaptive control method based on master-slave reference model
A technology of tele-operation robot and self-adaptive control, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of reducing and destroying the transparency of the system, and the operator's wrong judgment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
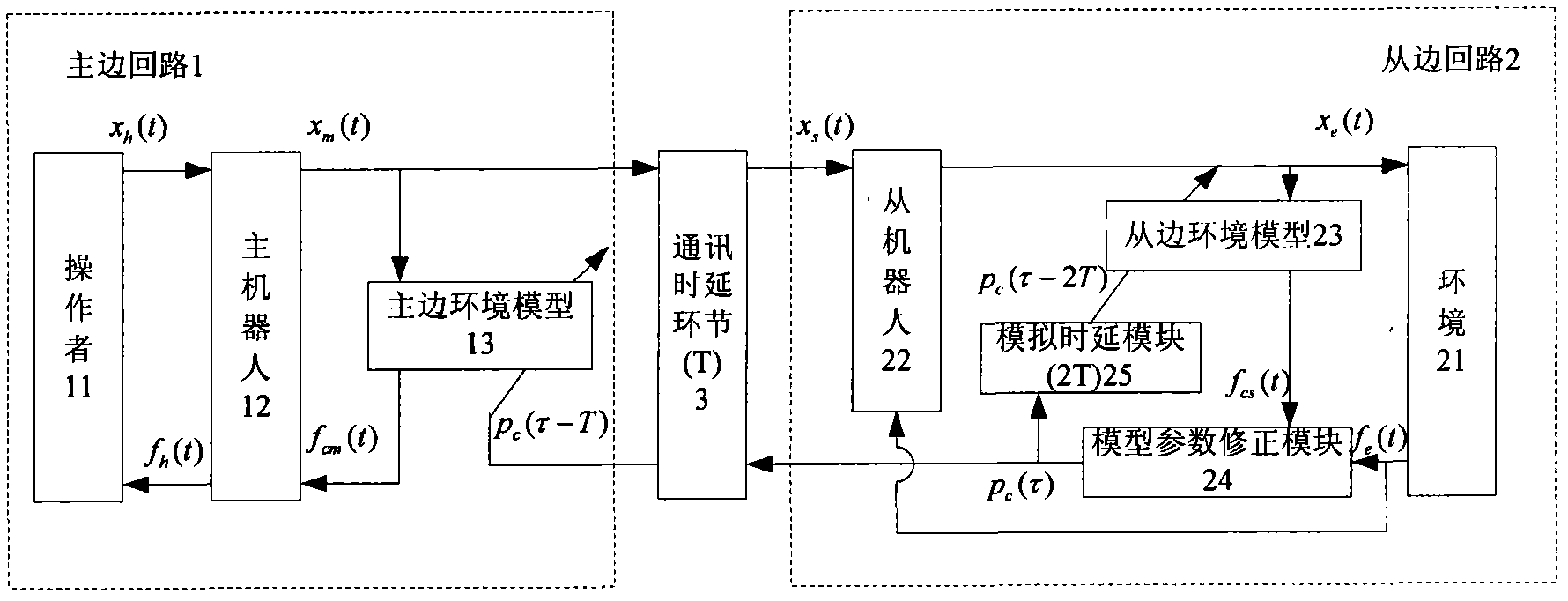
[0037] The teleoperated robot adaptive control method based on the master-slave reference model includes: a master side loop 1, a slave side loop 2 and a communication delay link 3, the master side loop 1 is composed of an operator 11, a master robot 12 and a master side environment model 13, the slave side circuit 2 is composed of environment 21, slave robot 22, slave side environment model 23, model parameter correction module 24 and simulation delay module 25, the master side environment model 13 is consistent with the slave side environment model 23 structure,
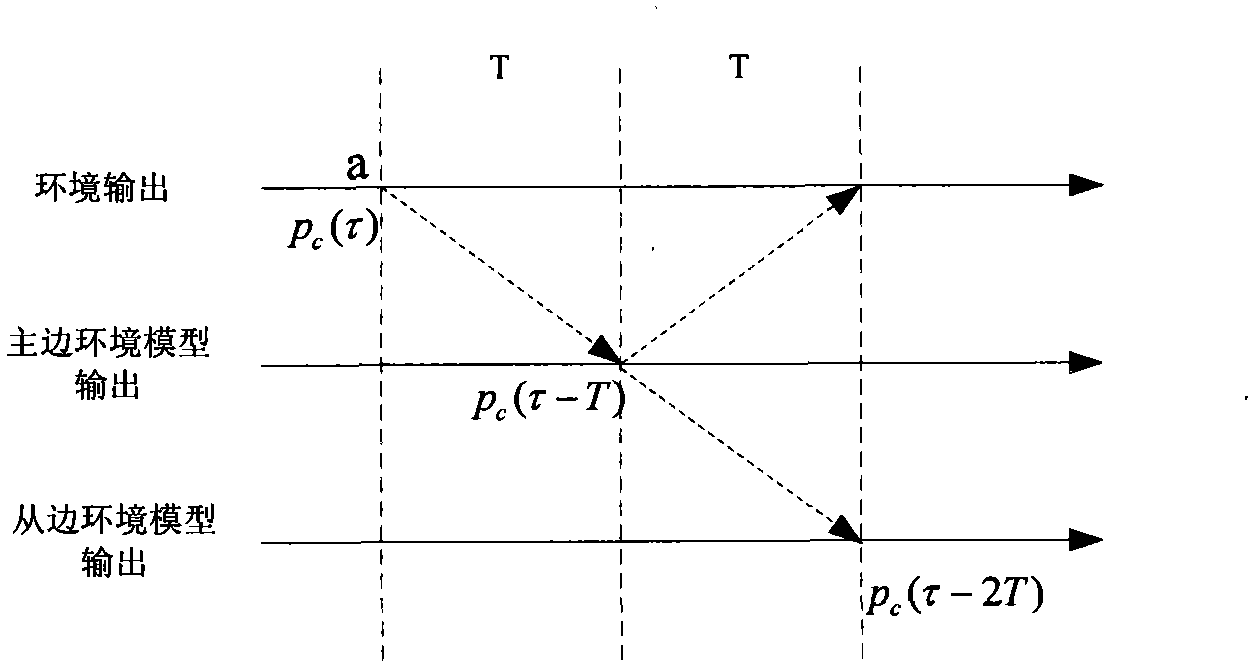
[0038] In a structured environment, it is known that the communication delay link 3 has a delay, and T is the delay amount of the communication delay link 3, and T=1s in the simulation. In a structured environment, we have a certain understanding of the environment to be faced, so we can establish a more accurate environmental model, but it is impossible to be completely consistent. The main edge environment model ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More