

Robot path planning method and apparatus thereof based on Bezier curve
A Bezier curve and path planning technology, which is applied in the direction of instruments, position/direction control, vehicle position/route/height control, etc., to achieve the effect of easy implementation, small amount of calculation, and simple method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the purpose, technical solution and advantages of the present invention clearer, the method and device for robot path planning based on Bezier curves of the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
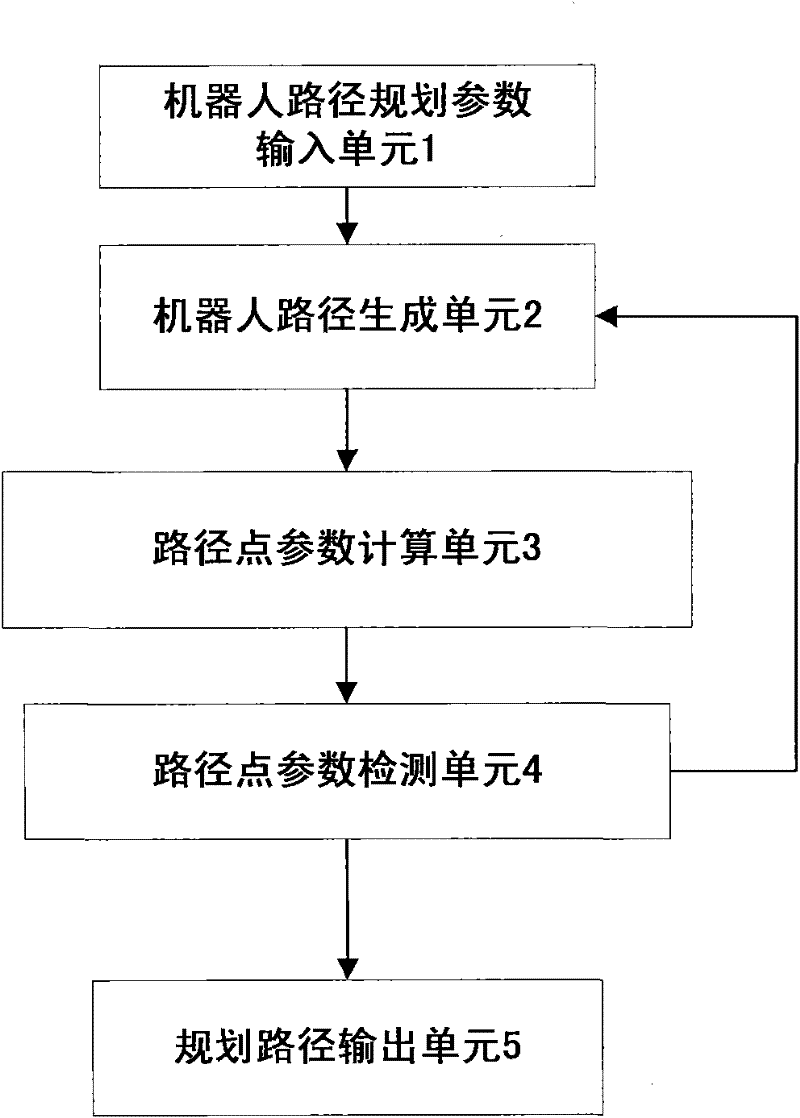
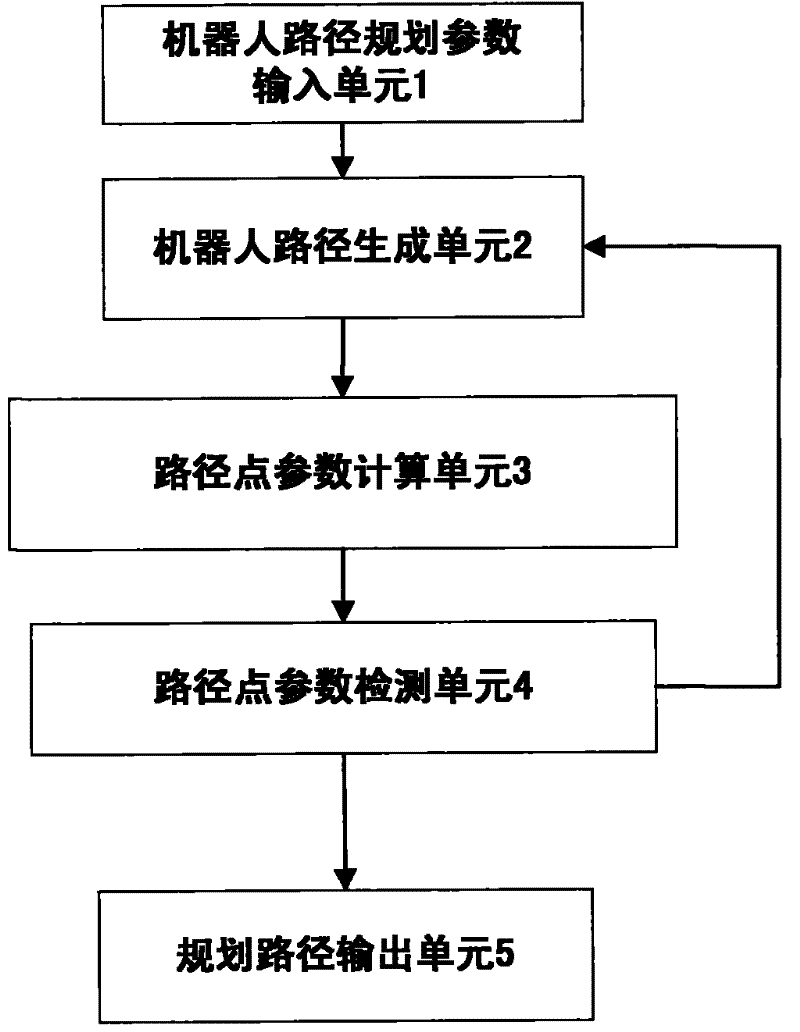
[0017] Such as figure 1 It shows a schematic diagram of the robot path planning structure based on the Bezier curve in the embodiment of the present invention. This structure is realized on a computer, and is composed of a robot path planning parameter input unit 1, a robot path generation unit 2, and a planning point parameter calculation unit 3. , a path point parameter detection unit 4, and a planning path output unit 5. The robot path planning parameter input unit 1 receives and sets the robot state parameters and constraint conditions, and the minimum time resolution of path discretization; the robot path generation unit 2 and the robot path plan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More