

Multi-AUV formation control method based on improved navigator virtual structure method
A control method and virtual structure technology, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system, etc., can solve problems such as failure of formation obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
[0042] The invention belongs to the technical field of multi-underwater robot formation control, and relates to a multi-AUV formation control method based on an improved navigator-virtual structure method.
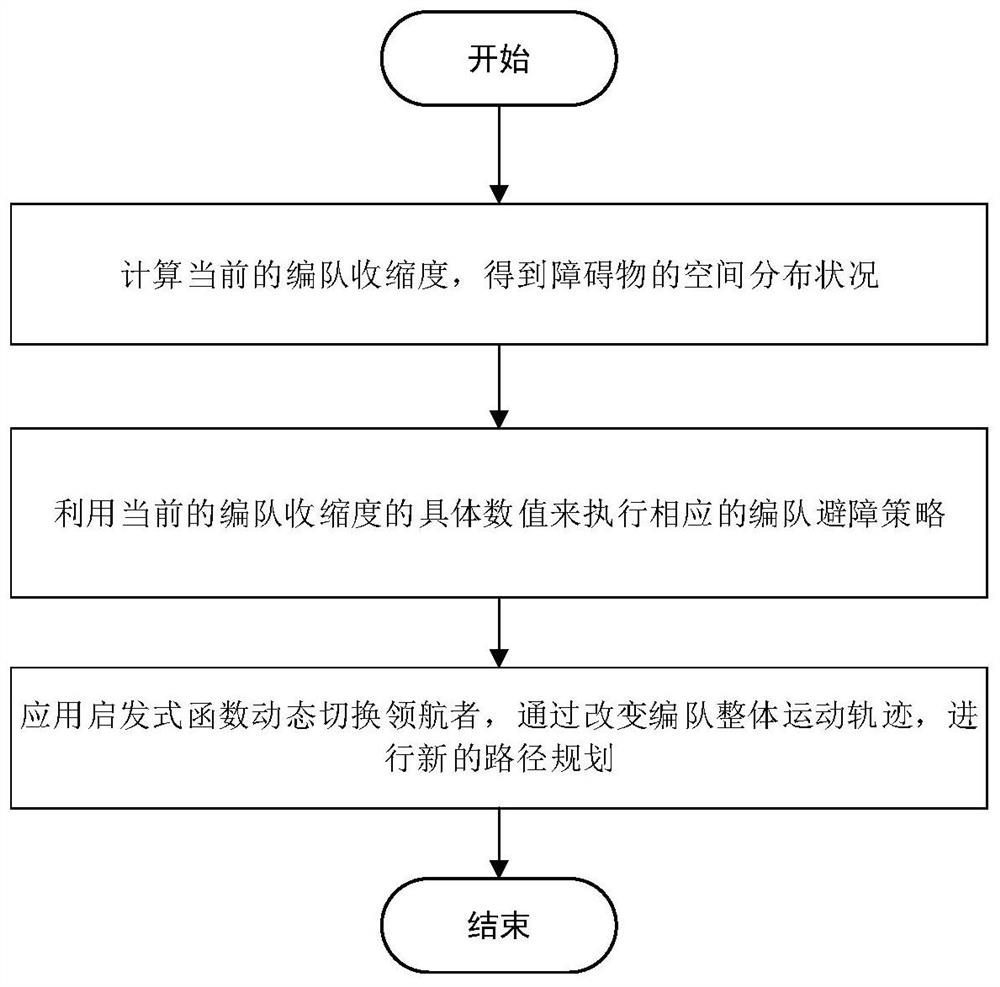
[0043] Aiming at the problems existing in the technical field of multi-underwater robot formation control at the present stage, the present invention proposes a multi-AUV formation control method based on the improved navigator-virtual structure method. This method not only effectively realizes path planning, but also effectively avoid obstacles in the environment. The multi-AUV formation control method of the improved navigator-virtual structure method proposed by the present invention mainly solves two key problems in the multi-AUV formation control by improving the original navigator method and the virtual structure method: one, solve The virtual structure cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More