

Vehicle auxiliary driving system and method based on unmanned aerial vehicle road perception
A vehicle assistance and driving system technology, applied in the direction of motor vehicles, control/regulation systems, vehicle position/route/height control, etc., can solve the problems of few fusion processing, inability to detect road conditions, and difficulty in determining real-time traffic conditions, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
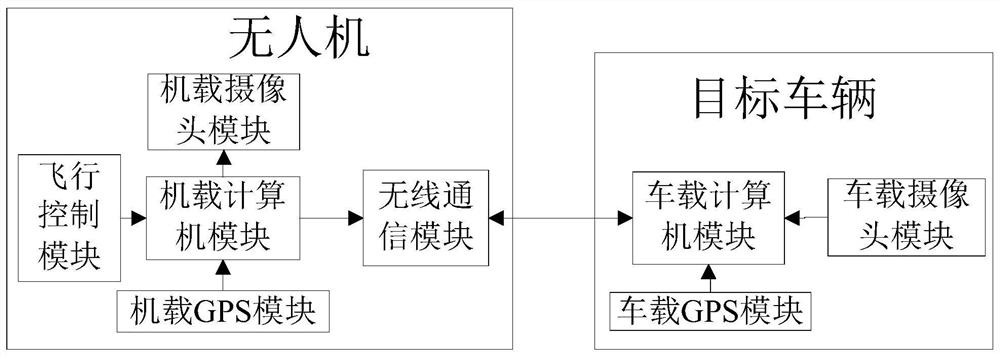
[0062] Such as figure 1 As shown, the present embodiment provides a vehicle assisted driving system based on UAV road perception, the system is provided with a UAV and a target vehicle; wherein the UAV is provided with an airborne controller, an airborne camera module, an Wireless communication module, flight control module and airborne GPS (global positioning system) module; The target vehicle is provided with vehicle-mounted controller, vehicle-mounted camera module, vehicle-mounted wireless communication module and vehicle-mounted GPS (global positioning system) module; The on-board camera module, on-board wireless communication module, flight control module, and on-board GPS module are connected; the on-board controller is connected to the on-board camera module, on-board wireless communication module, and on-board GPS module; the on-board wireless communication module communicates with the on-board wireless Module wireless connection;
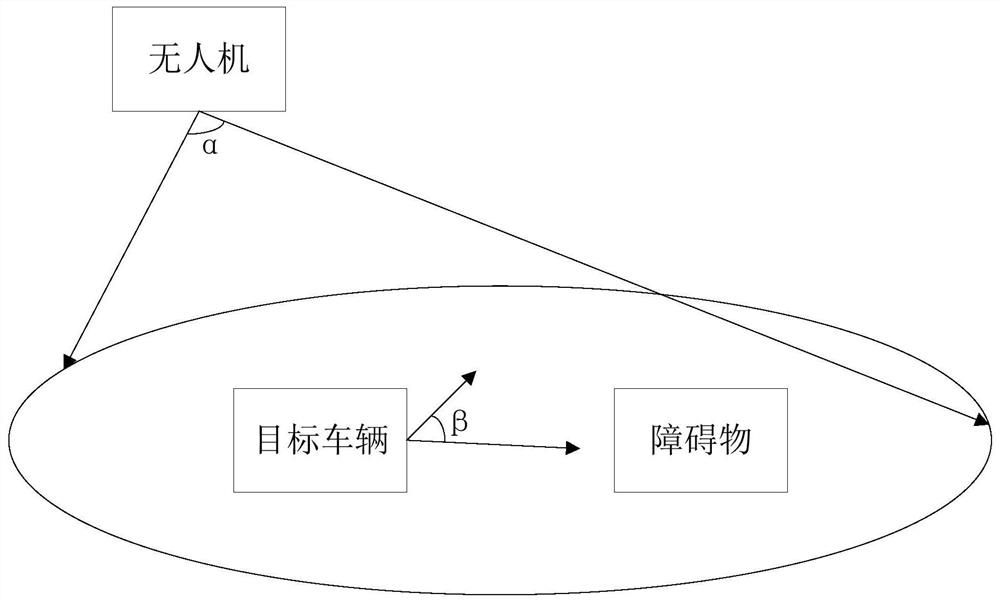
[0063] Such as figure 2 As shown...
Embodiment 2
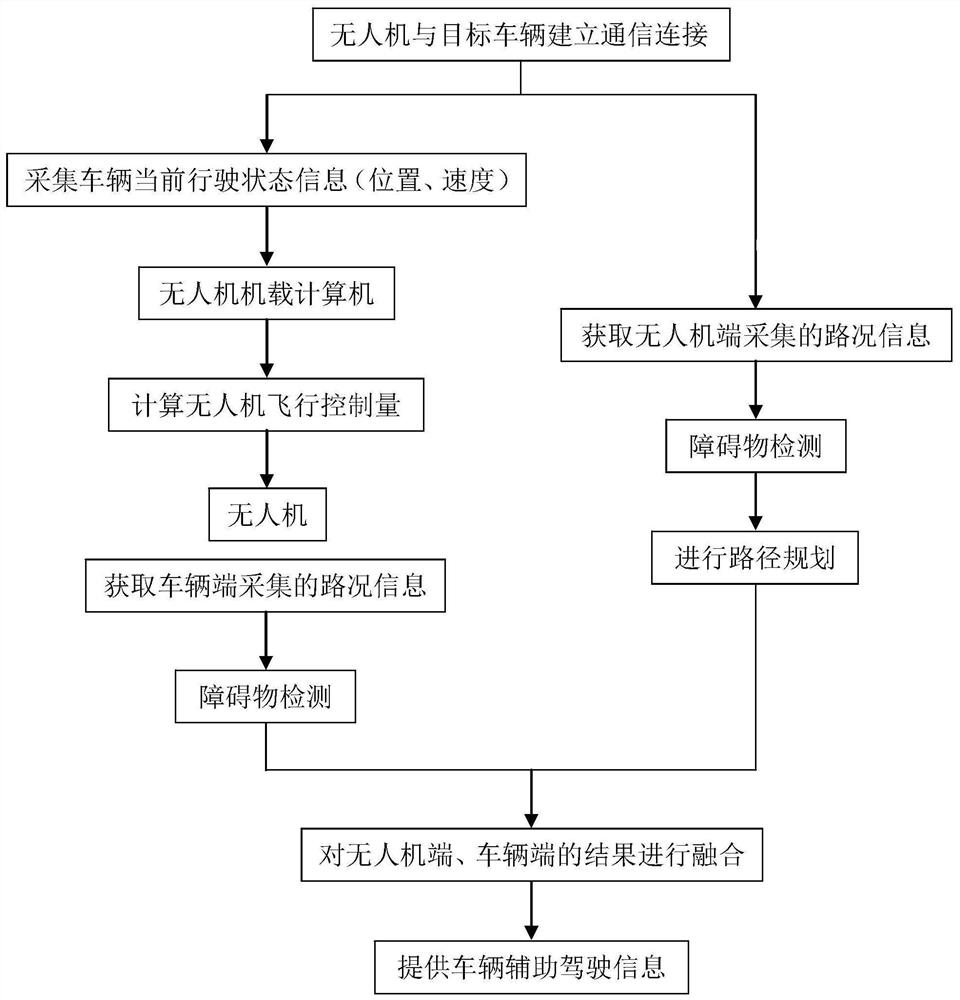
[0066] Such as image 3 As shown, the present embodiment also provides a method for controlling a vehicle assisted driving system based on UAV road perception, the method comprising the following steps:
[0067] S1: The UAV S establishes a communication connection with the target vehicle D, and the UAV transmits the first road condition information around the target vehicle captured by the onboard camera module to the on-board controller of the target vehicle; The location information of the drone is transmitted to the onboard controller of the drone. The UAV is lifted to a preset height through the flight control module, and the on-board camera module looks down at the target vehicle at a preset inclination angle; by calibrating the on-board camera module, the distance between the image pixels and the actual road length can be obtained. relationship, thereby reducing the error of environmental perception. In this embodiment, the preset height is set to 10 meters, and the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More