

Reconfigurable modular robot
A robotic and modular technology, applied in the field of robotics, which can solve problems such as hardware design problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
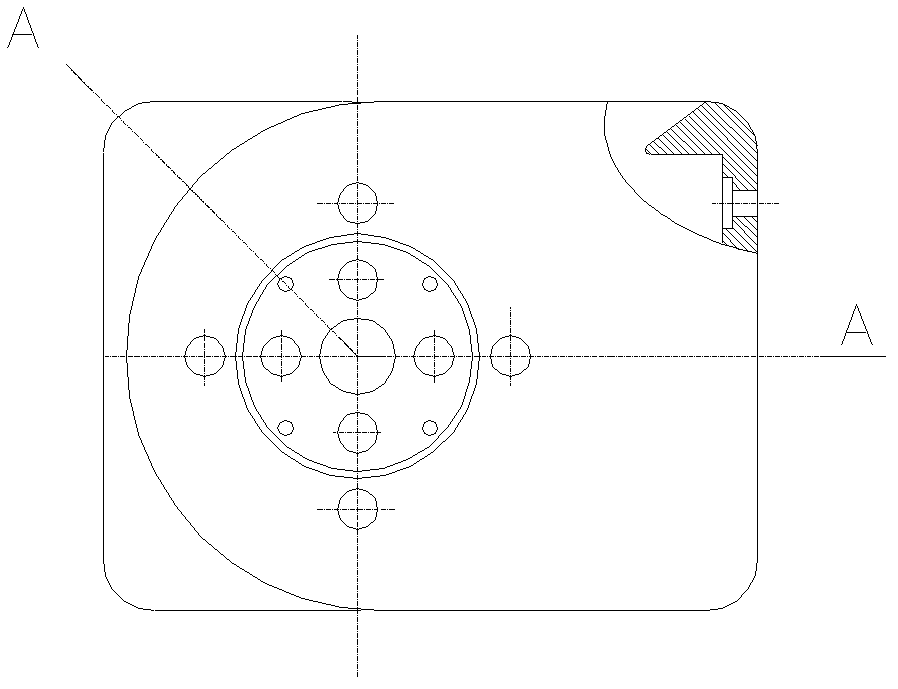
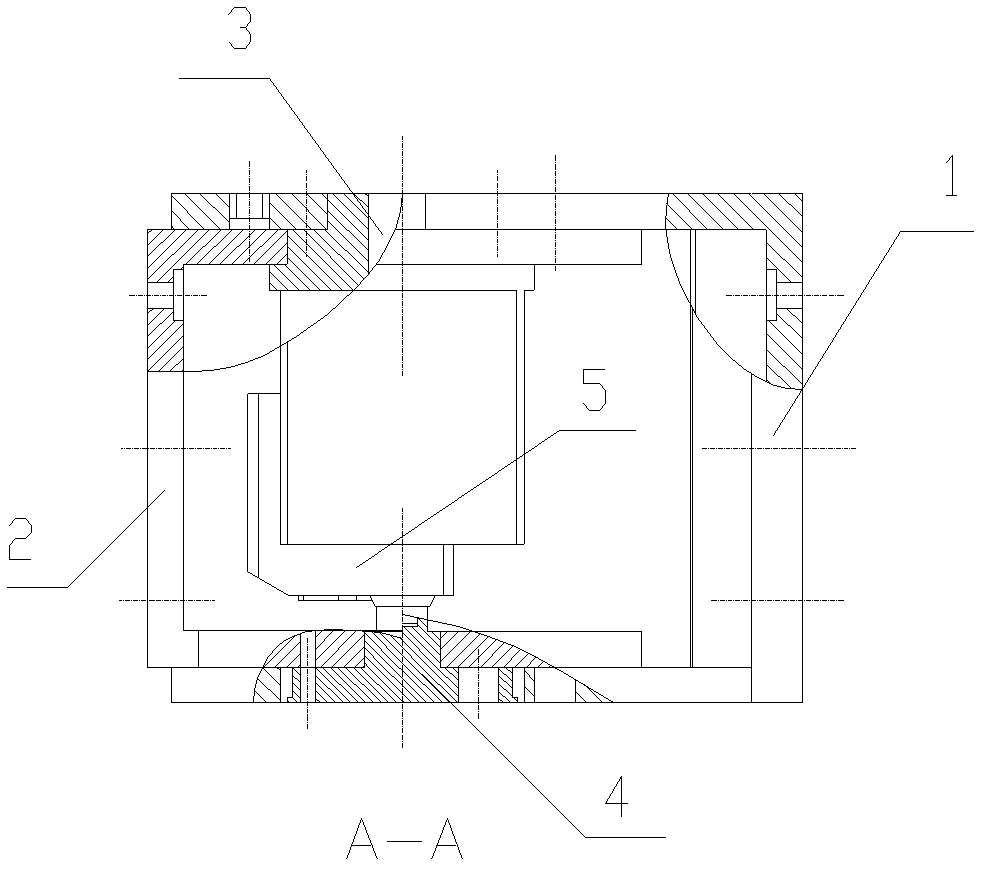
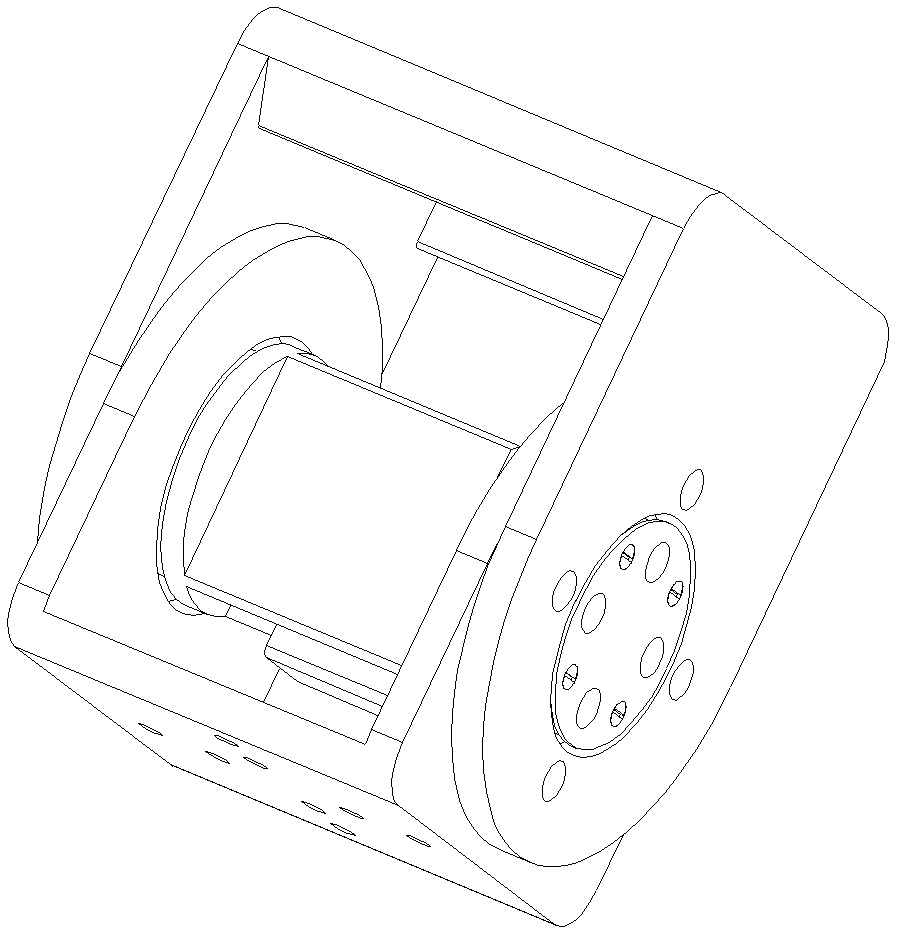
[0037] Example 1: Reconfigurable Modules
[0038] like Figure 1 to Figure 6 As shown, the reconstruction module is a 100*100*128 cuboid, including a U-shaped outer frame 1, a U-shaped inner frame 2, and one side of the U-shaped outer frame has a set of bolts fixed to the steering gear frame Hole 6 and a positioning hole 7, the other side has the outer frame bearing hole 8 that is connected with the bearing installed on the inner frame coupling shaft, and the two sides and the bottom side of the U-shaped outer frame are respectively provided with a group of module combination connection holes 9. The U-shaped inner frame has the inner frame bearing hole 10 that is connected with the steering gear frame 3 bearings on the side that cooperates with the U-shaped outer frame with the bolt hole surface, and the other side has a coaxial hole with the outer frame bearing hole that is used to pass through the inner frame. The matching holes 11 of the inner side pillow block of the fr...
Embodiment 2
[0040] Example 2: Refactoring Module Robot 1
[0041] like Figure 8 to Figure 11 As shown, the bottom sides of the U-shaped outer frames of the two modules are connected and reconstructed into a straight line. The two U-shaped outer frames form the main body. to go to the left), to perform special wheeled movement, take the right row as an example, Figure 8 for the movement to begin, Figure 9 is the state when turning an acute angle, Figure 10 is the state when turning through an obtuse angle, Figure 11 In order to turn over 180°, that is, the state of half a circle, rotate half a circle again to return to the initial position for the next step forward, and so on to achieve the purpose of going right.
[0042]
Embodiment 3
[0043] Example 3: Refactoring Module Robot 2 (Example of Combination of Four Refactoring Modules)
[0044] like Figure 12 to Figure 15 As shown, it is the mobile camera robot reconstructed by four modules of reconstruction module I, II, III, and IV. The U-shaped outer frame side C1 of reconstruction module I module The bottom side A of the U-shaped outer frame of II is fixedly connected, the U-shaped inner frame C2 of the reconstruction module II is fixedly connected with the U-shaped inner frame C2 of the reconstruction module III, and the bottom side A of the U-shaped outer frame of the reconstruction module III is connected to the heavy The inner frame C2 of the reconstruction module IV is connected, and a camera (not shown in the figure) is installed in the middle of the bottom side of the U-shaped outer frame of the reconstruction module IV. exist Figure 12 In the state of , the robot is in the stage of searching for the target. The rotation of the U-shaped inner f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More