

Rehealthy training robot control system and control method thereof
A technology of rehabilitation training and control system, applied in the field of rehabilitation medicine, can solve the problems such as rapid rehabilitation of the ankle joint of unfavorable patients, single active consciousness signal parameters, and inability to accurately reflect the active consciousness of patients.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to solve the problem that the traditional ankle joint rehabilitation training robot only has a fixed training mode and the parameters of the collected active awareness signal are single, a new method that can accurately reflect the patient's active awareness and perform ankle joint rehabilitation training according to the different needs of patients is proposed. rehabilitation training robot control system.
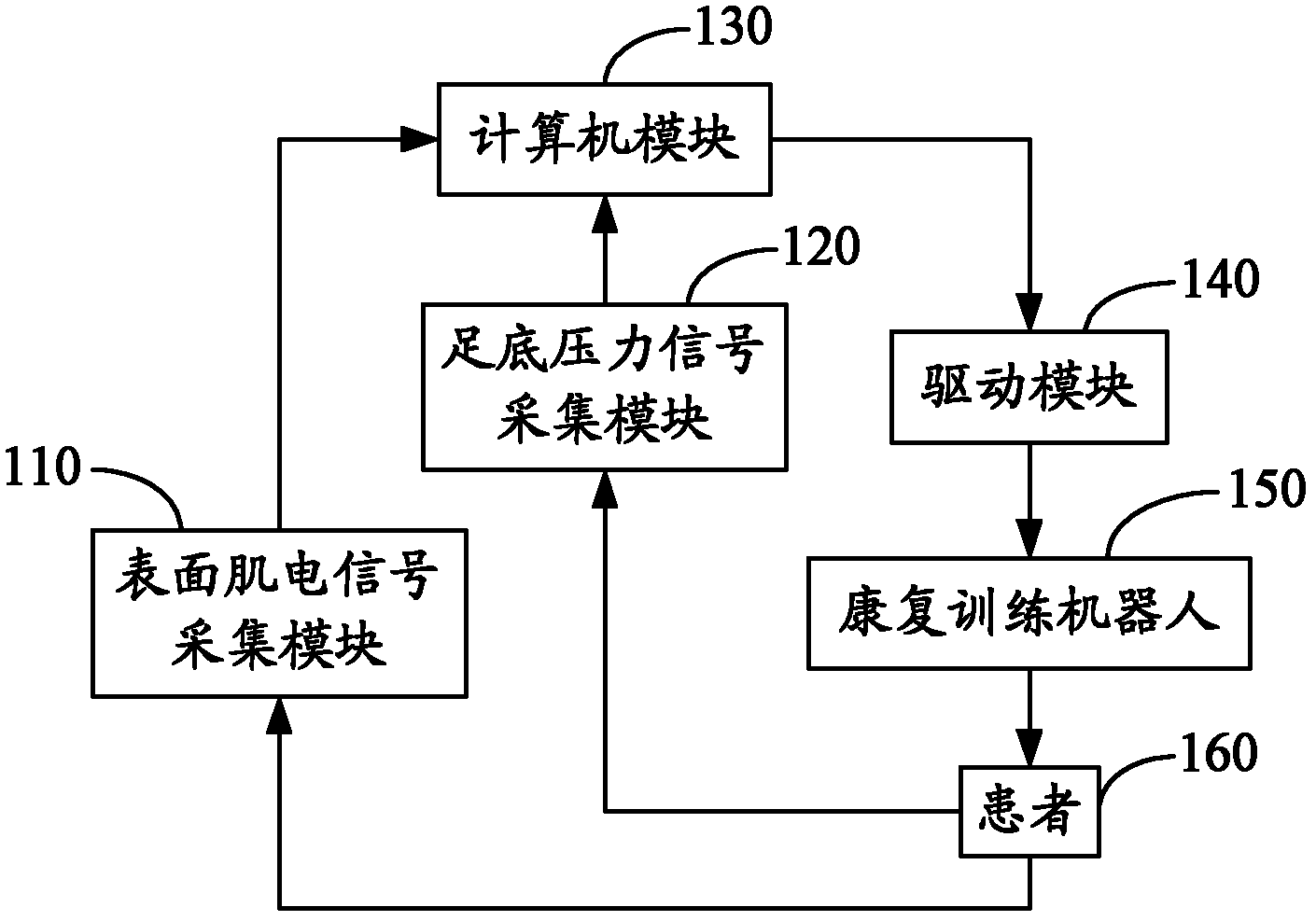
[0037] Such as figure 1 As shown, the rehabilitation training robot control system of the preferred embodiment includes a surface electromyography signal acquisition module 110 , a plantar pressure signal acquisition module 120 , a computer module 130 and a drive module 140 . The surface electromyographic signal collection module 110 is used to collect the surface electromyographic signals of the muscles of the calf of the patient 160 that control the movement of the ankle joint and convert the surface electromyographic signals from analog to digital. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More