

All-dimensional manipulator
A manipulator and all-round technology, applied in the field of manipulators, can solve the problems of troublesome rescue speed, low efficiency and high cost, and achieve the effects of stable and flexible operation, reduced time and fast rescue speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
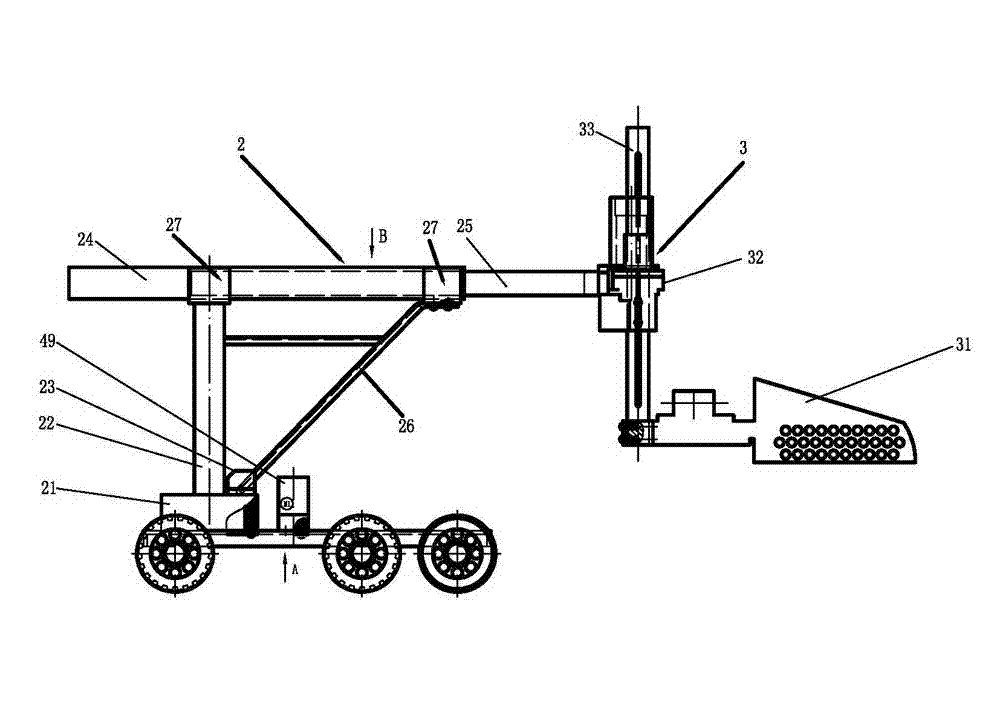
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings: As shown in the accompanying drawings, the present invention includes a chassis 1, a telescopic arm mechanism 2, and a mechanical gripper 3, and the mechanical gripper 3 is composed of a handle mechanism 31 and a steering mechanism. The handle mechanism 31 is fixed on the lower end of the embedded rack lifting rod 33 in the steering mechanism 32. The steering mechanism 32 is connected to the telescopic arm mechanism 2 through the embedded rack lifting rod 33. The sleeves 25 are connected, and the telescopic arm mechanism 2 is fixed on the chassis 1.
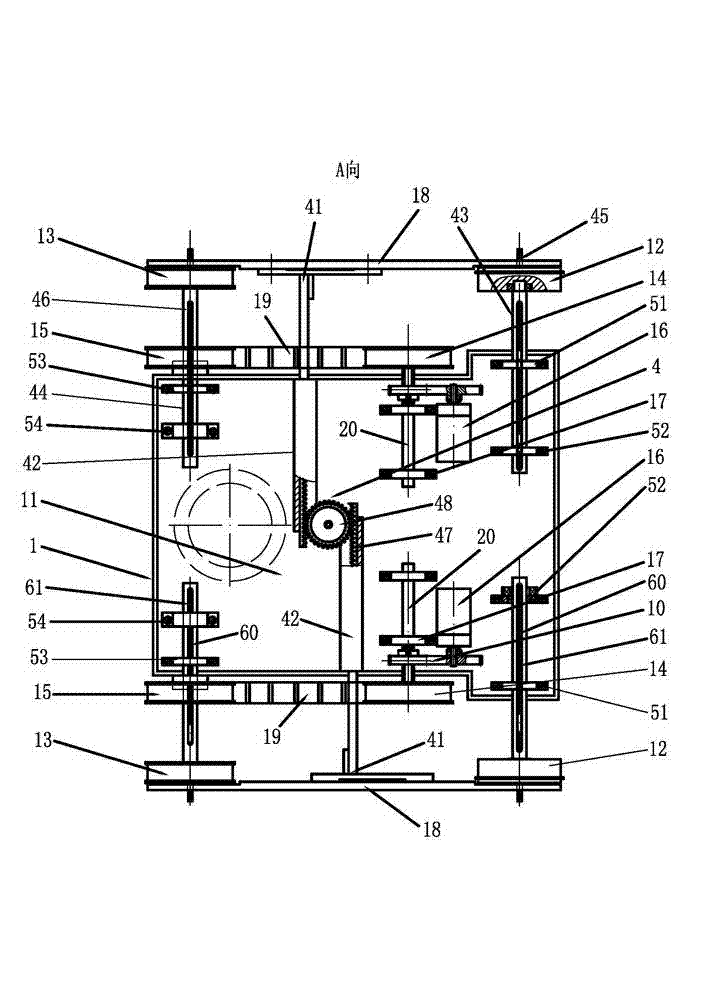
[0019] The chassis 1 includes a bottom plate 11, two front auxiliary wheels 12, two rear auxiliary wheels 13, two synchronous driving pulleys 14, two synchronous driven pulleys 15, two first motors 16, four bearings Seat 17, the radius of this front auxiliary wheel 12 and rear auxiliary wheel 13 is less than the radius of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More