

Balance control method of multi-leg robot
A multi-legged robot, balance control technology, applied in two-dimensional position/channel control and other directions, can solve problems such as rare multi-legged robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
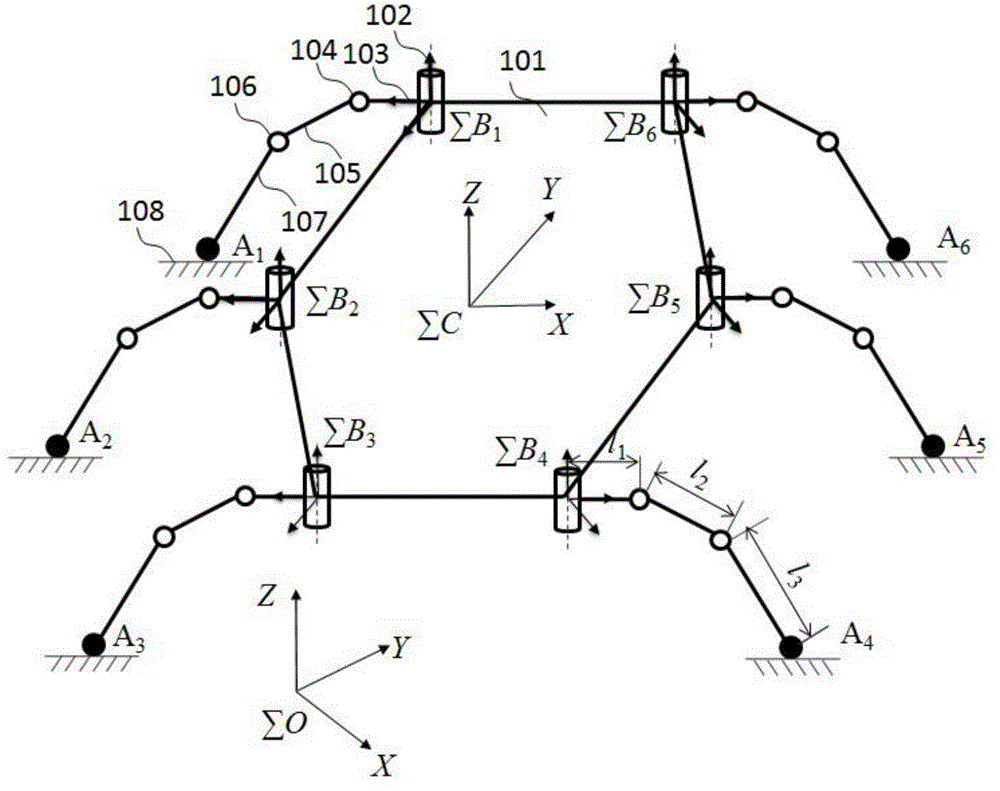
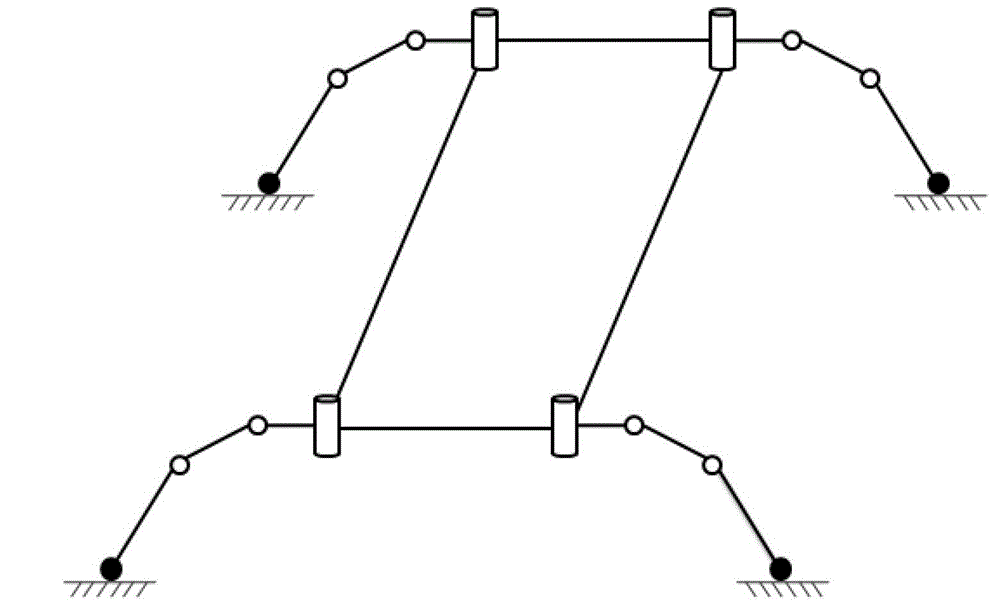
[0026] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto. This specific embodiment selects the hexapod robot in the multi-legged robot (such as figure 1 shown) as the action object, but the implementation object is not limited to this, it can also act on quadruped robots (such as figure 2 shown), eight-legged robots and other multi-legged robots.
[0027] figure 1 It is the schematic diagram of the structure of the hexapod robot and the definition of each coordinate system. The robot is composed of a fuselage 101 and six legs, and the six legs are respectively numbered 1, 2, 3, 4, 5, 6 in the counterclockwise direction. Each leg consists of a base section 103 , a thigh 105 and a lower leg 107 . The fuselage 101 and the base section 103 are connected through the hip joint 102, the base section 103 and the thigh 105 are connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More