

Five Freedom Robotics, Driving Circuit and Control Methods
A control method and technology of manipulators, applied in the field of manipulators, can solve the problems of manipulator shaking, less degrees of freedom, increased weight, etc., and achieve the effect of flexible activities and increased range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0030] The invention proposes a five-degree-of-freedom manipulator.
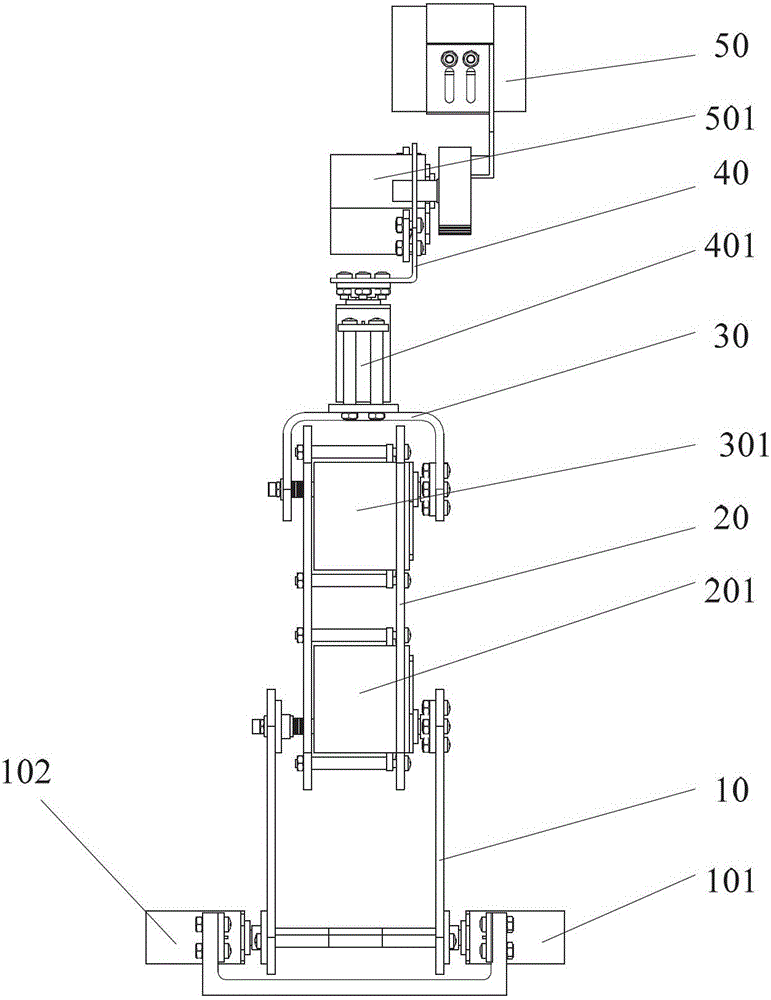
[0031] refer to figure 1 , Schematic diagram of the structure of the five-degree-of-freedom manipulator of the present invention.
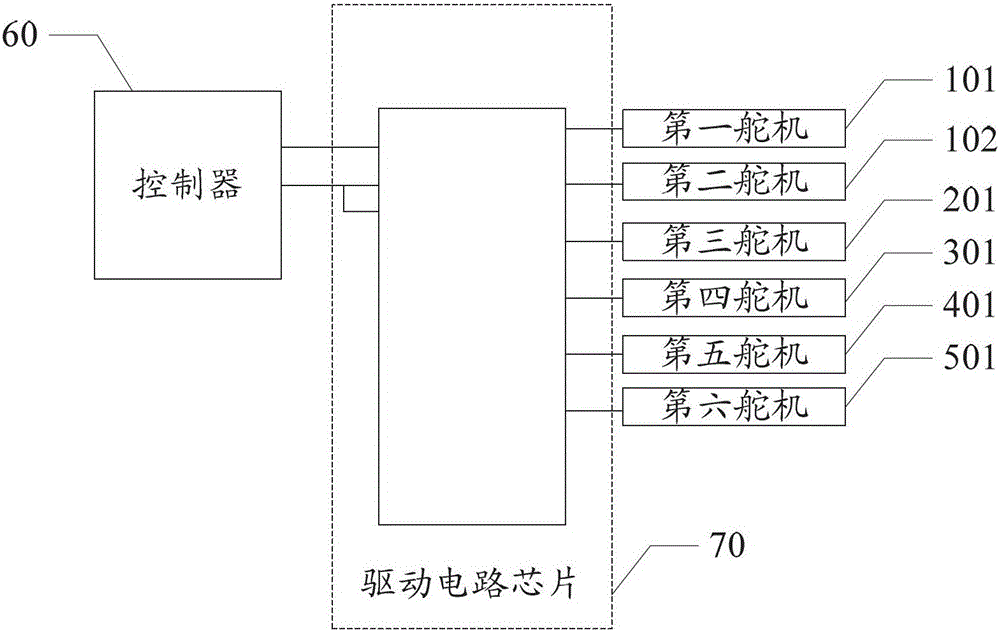
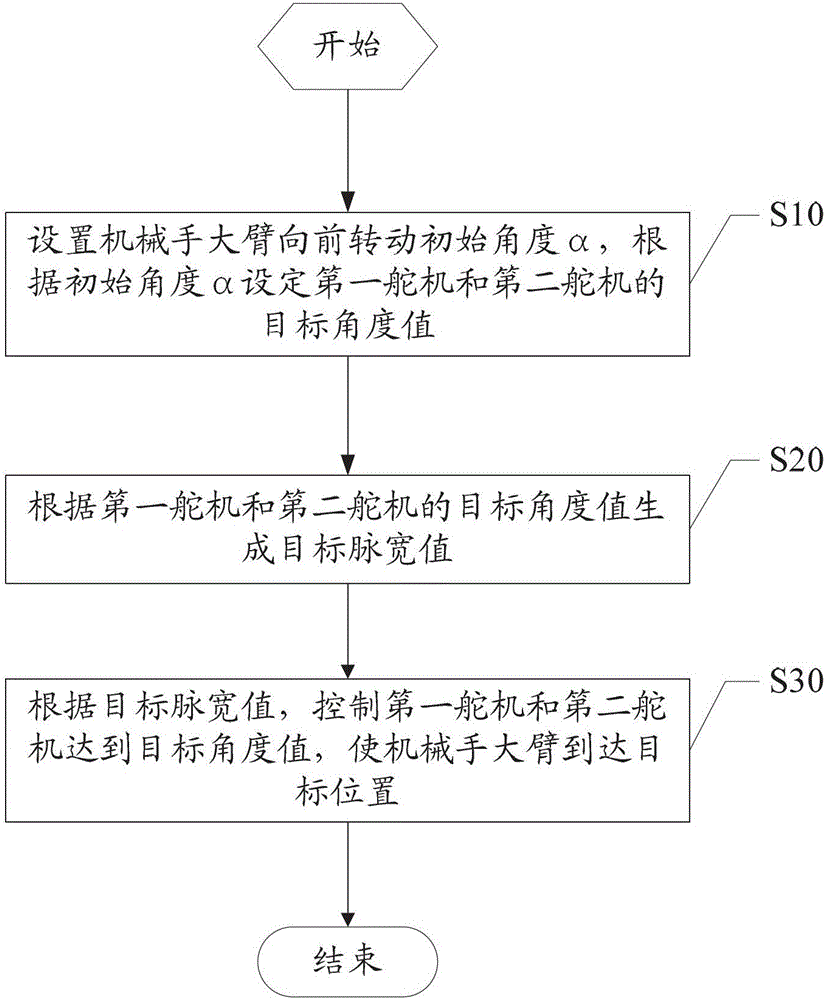
[0032] In this embodiment, the five-degree-of-freedom manipulator includes a manipulator arm, a manipulator forearm, a first wrist, a second wrist, and a manipulator palm that are connected in sequence, and also includes a pair of parallel arms arranged on both sides of the bottom end of the manipulator arm. The first steering gear and the second steering gear are used to control the operation of the arm of the manipulator; the third steering gear is used to drive the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More