

Inspection robot system along split conductors
A technology for working robots and splitting wires, applied in the field of robot systems, can solve problems such as low obstacle crossing efficiency, unstable machine posture, and inability to ensure safe operation, and achieve the effects of improving system reliability, dispersing system risks, and having a simple and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
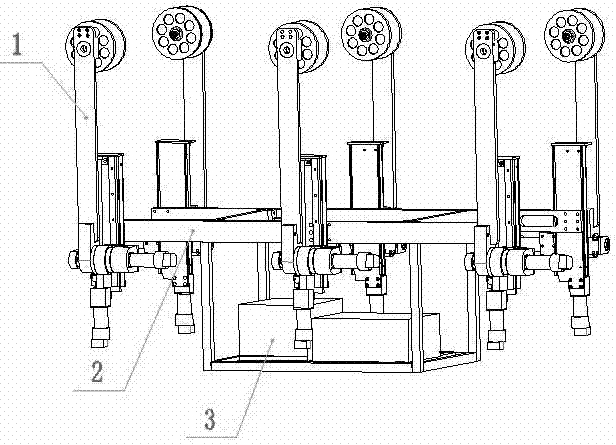
[0030] The present invention operates on any two horizontally adjacent split wires, and can adapt to changes in wire spacing, such as figure 1 , 2 As shown, it includes a driving arm 1 with the same structure, a connecting plate frame 2 and a control box 3, wherein each driving arm 1 includes a driving wheel mechanism, a lifting joint 10 and a rotating joint 9 with the same structure; the driving arm 1 passes through the driving wheel 6 Suspended from split wires.
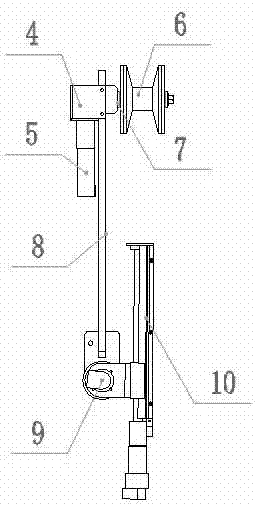
[0031] Such as figure 2 As shown, the drive wheel mechanism includes a transmission device 4, a drive motor 5, a drive wheel 6, a drive shaft 7 and a fixed plate 8; wherein, the two ends of the drive shaft 7 are respectively provided with a drive wheel 6 and a transmission device 4, and are hinged on the fixed plate 8, the transmission device 4 is arranged on the fixed plate 8, and the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More