

Control method for automotive active suspension system
A technology of active suspension and control method, applied in the field of control, can solve the problems of being unable to deal with external uncertain disturbances and unmodeled dynamics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
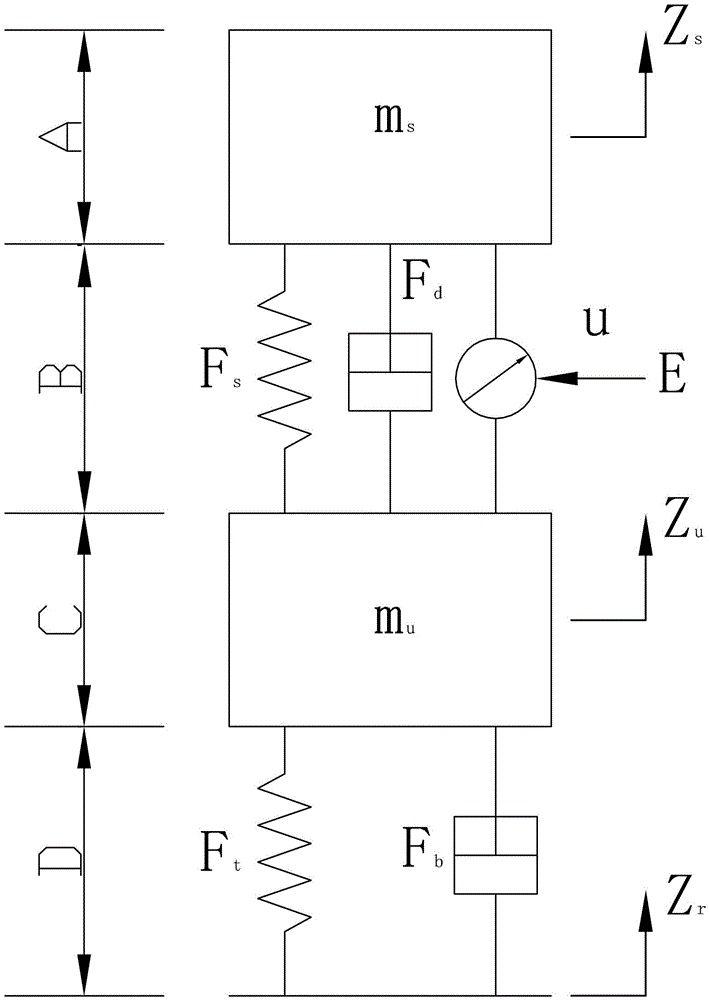
[0053] Specific implementation mode one: combine Figure 1 to Figure 3 Describe this embodiment, the concrete steps of the control method of a kind of automobile active suspension system described in this embodiment are as follows:
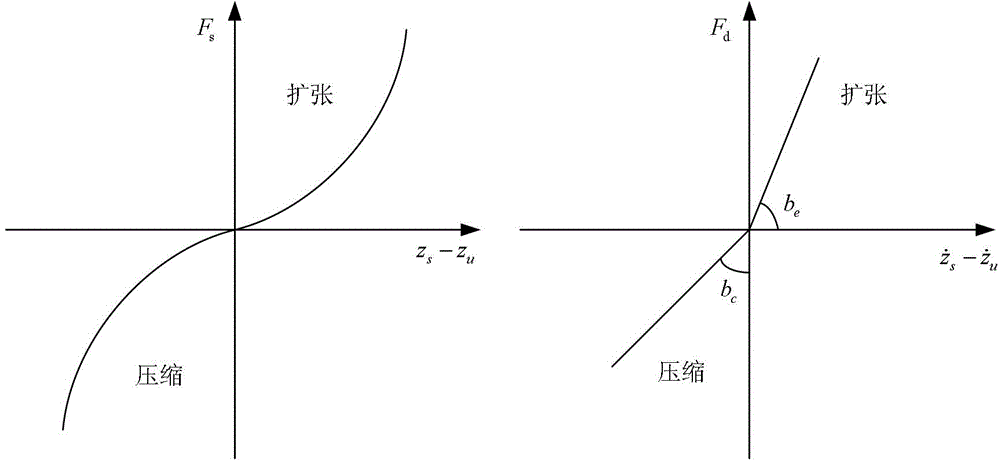
[0054] Step 1. Establish a nonlinear active suspension model. According to Newton's second law, the dynamic equation of the suspension system is:
[0055] m s z · · s + F d + F s = u + F l - - - ( 1 ) ,
[0056] m u z · · u - ...
Embodiment
[0102] The vehicle active suspension system parameter is the total mass of the vehicle body: m s =320kg; unsprung mass: m u =40kg; spring linear rigidity coefficient: k s1 =15000N / m; Spring nonlinear rigidity coefficient: k n1 =1000N / m; tire elastic coefficient: k f =10000N / m; tire damping coefficient: b f =2000Ns / m; Suspension damping coefficient: b e =1500Ns / m; b c =1200Ns / m; vehicle forward speed: V=20m / s.
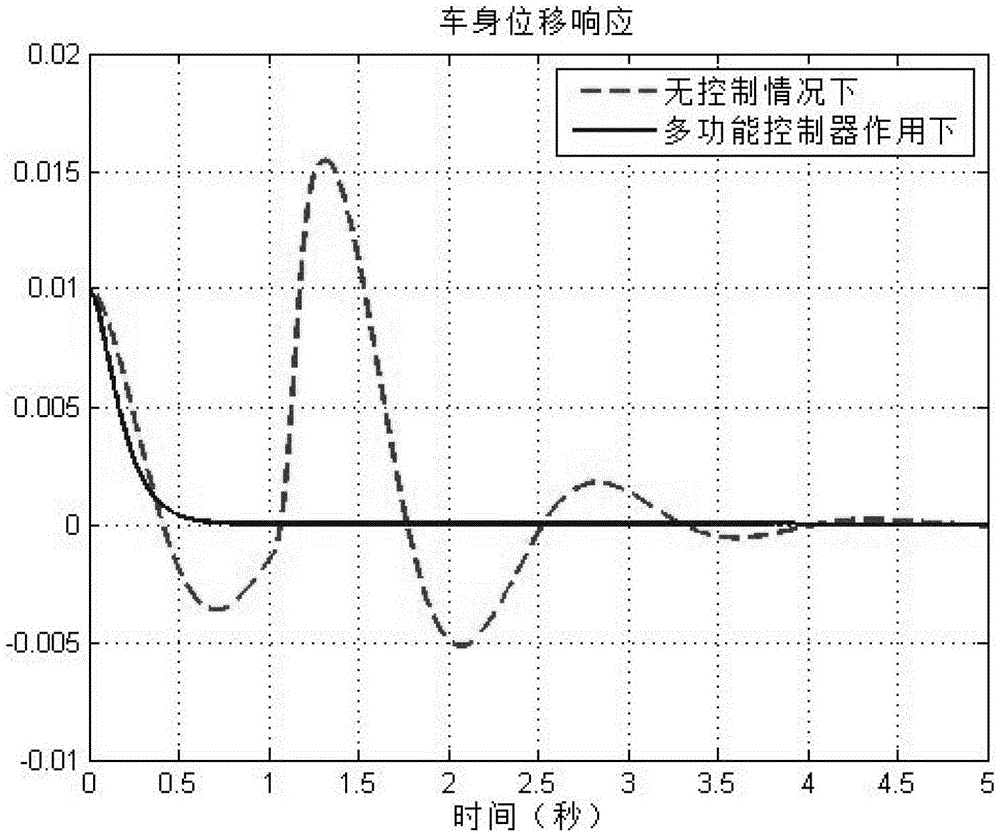
[0103] Selection of control law parameters: system initial value condition initial displacement of vehicle body x 1 (0) = 1cm; x 2 (0)=x 3 (0)=x 4 (0)=0;k 1 =k 2 =10; both the nonlinear robust control gain and the energy attenuation gain are selected as 10.
[0104] The effect of the control law:
[0105] During the driving process of the vehicle, the main road disturbance is the lumpy road disturbance, and its mathematical description is as follows:
[0106] z o 1 = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More