Structured control method for automobile active suspension system and control device
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A structured control and active suspension technology, applied to suspensions, elastic suspensions, vehicle components, etc., can solve problems such as the inability to achieve dynamic adjustment, the uncertainty of system parameters, and the single control target
Active Publication Date: 2018-07-24
GUANGZHOU UNIVERSITY
View PDF3 Cites 7 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0009] An embodiment of the present invention provides a structured control method for an active suspension system of an automobile to solve the problem that the control design of the existing active suspension control system does not consider the uncertainty of system parameters, the control target is single, and dynamic adjustment cannot be realized. Technical problems, thereby effectively improving the handling stability, driving stability and ride comfort of the car, while simplifying the design of the controller for easy implementation
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
no. 2 example
[0195] On the basis of the first embodiment of the present invention, the parameters of the quarter vehicle active suspension system model are shown in Table 1 below:
[0196]
[0197] Table 1
[0198] In order to test the effect of the controller, consider the uncertain parameter of the system as: Δm s =+30%·m s , Δk s =±5% k s , Δk t =+30%·k t , Δc s =±20%·c s , Δc t =±5%·c t , set the system parameters of the system as: Q=0.05, α=1.5, δ=0.001, β=1, β 1 = 1·10 -9 , β 2 = 1·10 -3 ;
[0199] Then the parameter value of the controller is: r=500, and the controller is obtained as follows: u(t)=-Kx(t)=-B T Px(t),
[0200] where K=rB T P=[25.5134-598.2945 7622.8835 1400,0824].
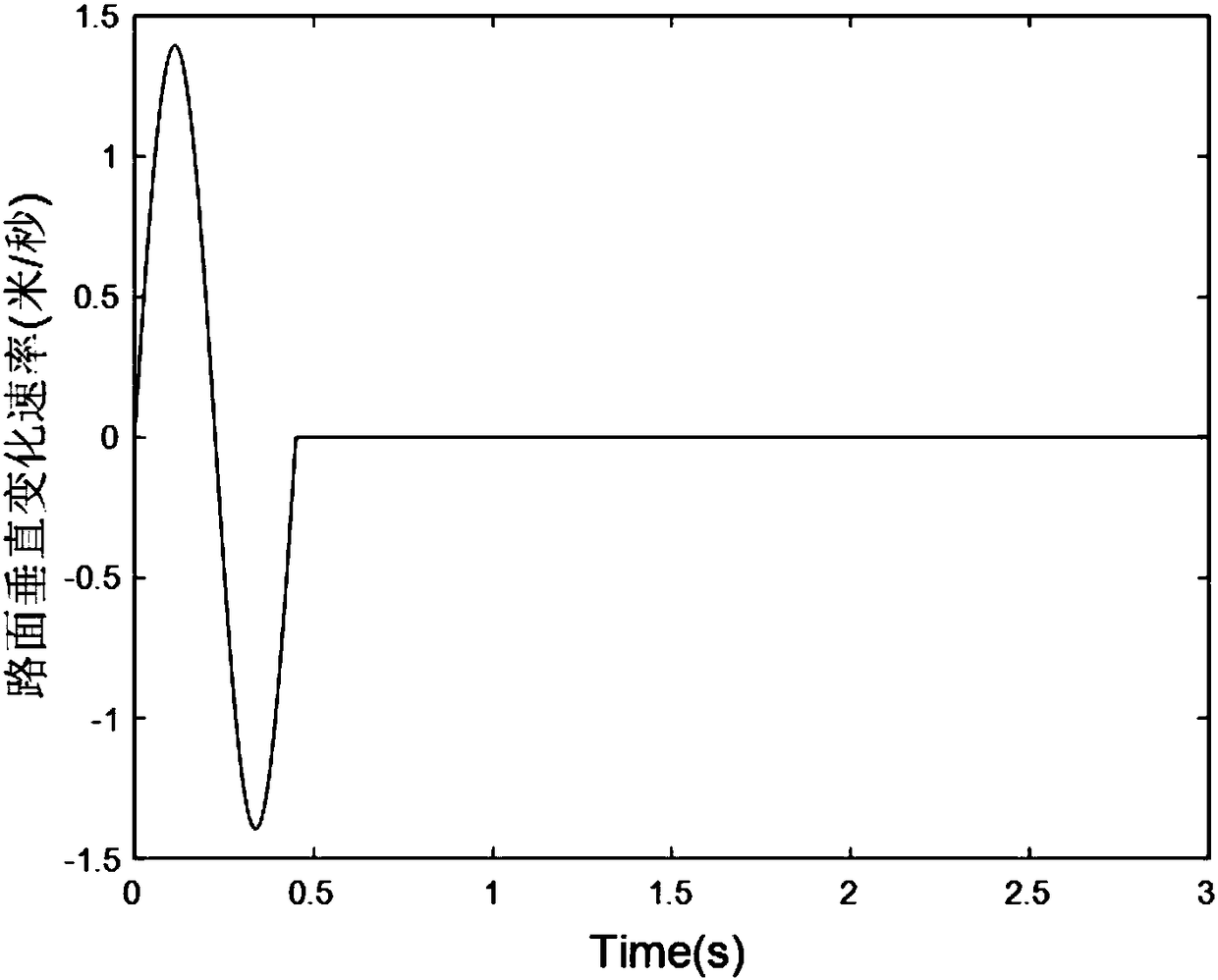
[0201] Specifically, exemplary, image 3 Indicates that during the driving process of the vehicle, the main road disturbance is a lumpy road disturbance, and its mathematical description is:
[0202]
[0203] Among them, A and L are the height and length of the road surface input r...
no. 3 example
[0208] The difference between this embodiment and the second embodiment is: the load of the vehicle body has increased the vehicle body m s When the measured weight of the vehicle body changes, the structured controller can still meet the control requirements for the stability of the vehicle body, and other contents will not be repeated here.
no. 4 example
[0210] The difference between this embodiment and the third embodiment is that the vehicle speed V changes, and the structured controller still meets the control requirements for vehicle body stability, and other details will not be repeated here.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
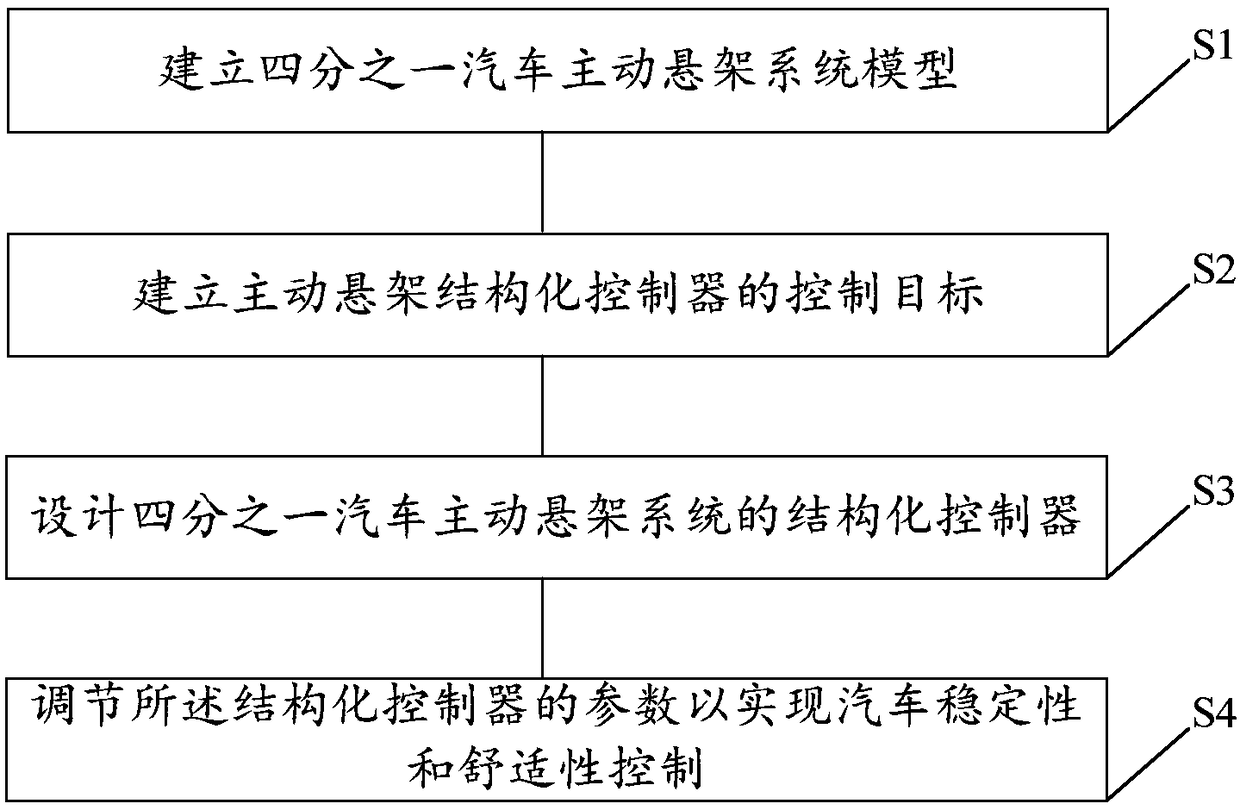
The invention discloses a structured control method for an automobile active suspensionsystem and a control device. The structured control method for the automobile active suspensionsystem comprisesthe following steps of establishing 1 / 4 automobile active suspensionsystem model; establishing a control target of an active suspension structured controller; designing a structured controller of the 1 / 4 automobile active suspension system; and adjusting parameters of the structured controller to realize automobile stability and comfort control. According to the structured control method for theautomobile active suspension system, the operation stability, the driving stability and the taking comfort of an automobile can be effectively improved and the design of the controller can be simplified to be easy to implement. The invention further provides a structured control device for the the automobile active suspension system.
Description
technical field [0001] The invention relates to the technical field of automobile control, in particular to a structural control method and a control device for an active suspension system of an automobile. Background technique [0002] At present, the suspension system has a great influence on various performances such as the safety, passability, ride comfort, handling stability, and ride comfort of the car. In recent years, active suspension systems have been extensively studied due to their good control performance and a series of control methods have been produced. [0003] The active suspension can adjust the damping and stiffness coefficients at the same time. Adding an active force generator to the suspension can automatically generate the corresponding force and balance it according to the mass of the car and the excitation of the ground. Therefore, the active suspension system not only has support In addition to the basic function of the weight of the vehicle body,...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More