For this type of
lawn mowing robot, the degree of intelligence is low, and there are the following deficiencies in
actual use: the existing
lawn mowing robot uses a stepping motor, which will cause the motor to lose synchronization when it encounters missing pulses, resulting in the calculation of the mowing position. An error occurred and the mowing robot lost its actual position
It will also make the body heat more seriously, and sometimes it is necessary to install a cooling device, which will increase the overall weight of the robot, which is not conducive to the robot climbing and mowing
The last point is that mowing robot systems are generally not suitable for high-speed operation and are prone to vibration
[0004]
The current design of
lawn mowing robots usually adopts single-wheel drive or two-wheel drive. Although the
lawn mowing robot with single-wheel drive can satisfy the decoupling of speed and direction well, the power of the walking motor with single-wheel drive is relatively large. It will cause the phenomenon of big horses and small carts
Since there is only one power contact point between the power of the single-wheel-driven lawn mowing robot and the ground, it is difficult for humans to precisely control the direction of its movement, and a slight disturbance can cause a large direction change.
Two-wheel drive can weaken some of the disadvantages of single-wheel drive, but the mowing robot needs to overload the motor to meet the power requirements when climbing a slope or encountering potholes on the ground. Long-term operation will damage the performance of the motor and cause
system reliability. greatly reduced sex
The lawn mowing robot needs to accelerate rapidly and run at a high speed in many
emergency situations. Under such conditions, the power required by the system is relatively large, and the power of the two-wheel motor that meets the normal driving cannot meet the acceleration requirements, and the system cannot meet the emergency conditions. power requirements
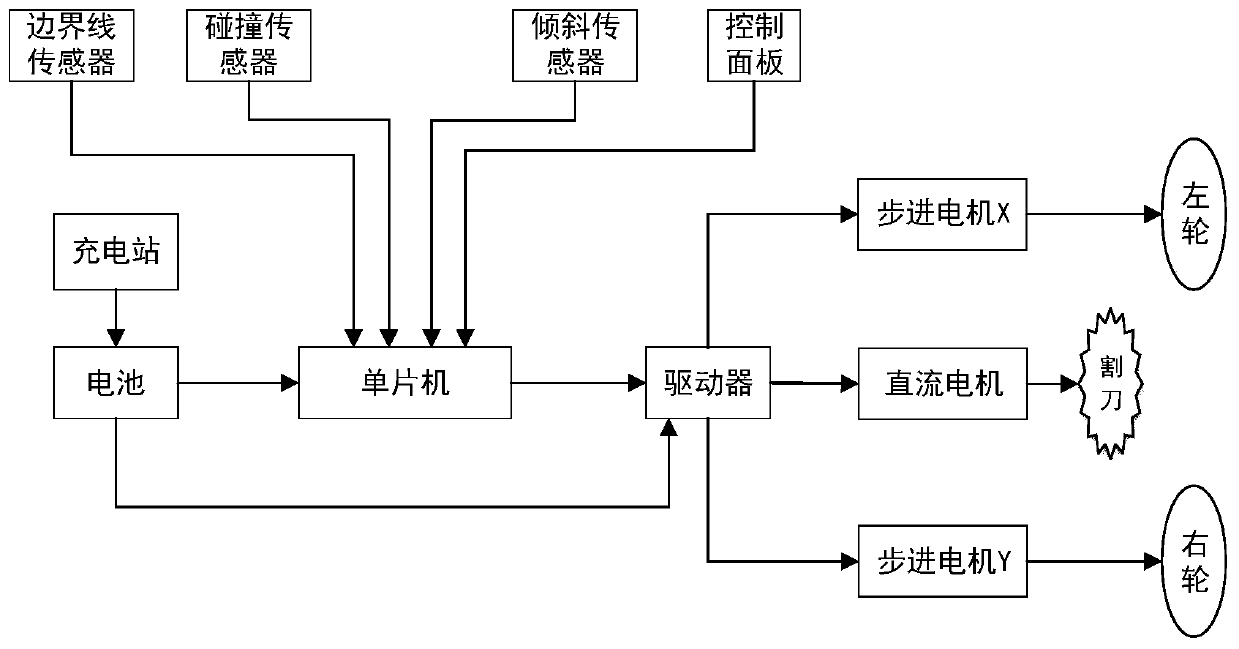
[0005] Existing designs of lawnmowing robots use a single-core control such as figure 1 , need to process path planning, navigation control,
motor control and other work at the same time, the amount of calculation is large, resulting in slow calculation speed, low control frequency and poor precision
Due to the frequent braking and starting of the mowing robot during operation, the
workload of the single-core controller is increased, and the single-core controller cannot meet the requirements of
fast start and stop of the mowing robot
Due to the interference of unstable factors in the surrounding environment, the controller of the single-core lawn mowing robot often has abnormalities, causing the lawn mowing robot to lose control during driving, and the anti-interference ability is poor
Although the PWM
control signal of the multi-axis motor can be generated based on the dedicated
servo control
chip, it needs to be realized by inputting
control parameters after the main controller communicates with the dedicated
chip, resulting in a decrease in the overall computing speed; affected by the internal
servo program of the dedicated
servo control chip, In general, the
servo control PID parameters cannot be changed in real time, which cannot meet the requirements of the real-time fast
servo control system of the mowing robot; the
motion mode of the mowing robot adopts a simple straight line walking and turning when encountering a boundary, lacks global path planning, and is not intelligent enough
The mowing robot walks blindly during the mowing process, resulting in repeated paths,
wasting energy, and short battery life
The mowing robot cannot
record the area that has been mowed, and the same area will be mowed repeatedly, and the mowing efficiency is low
The lawn mowing robot uses a timing work mode, which cannot distinguish the areas that have been mowed from those that have not been mowed. After the mowing operation is completed, some areas are often not mowed, resulting in missed mowing.
The
boundary line needs to be installed manually, which is cumbersome and requires a lot of work
After the boundary line is pre-embedded, it is difficult to modify if the mowing area changes
The boundary line is exposed to the outdoors all year round and is easily damaged by
corrosion, oxidation, and animal damage
The mowing robot can only determine whether it is out of bounds by sensing the boundary line, but cannot get its own precise position
The
cut grass is relatively large, and it is still left on the lawn, which needs to be cleaned manually again, which is labor-intensive
[0006] In addition, the lawn mowing robot needs to be started locally by pressing the button, and it cannot mow the lawn if the person is not at home
All the operation information of the mowing robot is processed locally, and the outside world cannot know the operation status and mowing progress
If the mowing robot breaks down or other emergencies, personnel need to go to the scene to check and control, which is not conducive to the development of mowing
automation


 Login to View More
Login to View More  Login to View More
Login to View More