

Four-rotor aircraft speed control method based on integral variable structure control
A quadrotor aircraft, variable structure control technology, applied in attitude control and other directions, can solve the problems of large delay in measuring position signals, expensive GPS modules, inaccurate status information, etc., to improve accuracy, enhance robustness and anti- Interference, effects that increase stability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solution of the present invention will be described below in combination with specific implementation modes. It should be noted that the embodiments only deepen the understanding of the technical solutions, but do not limit the invention in any way.
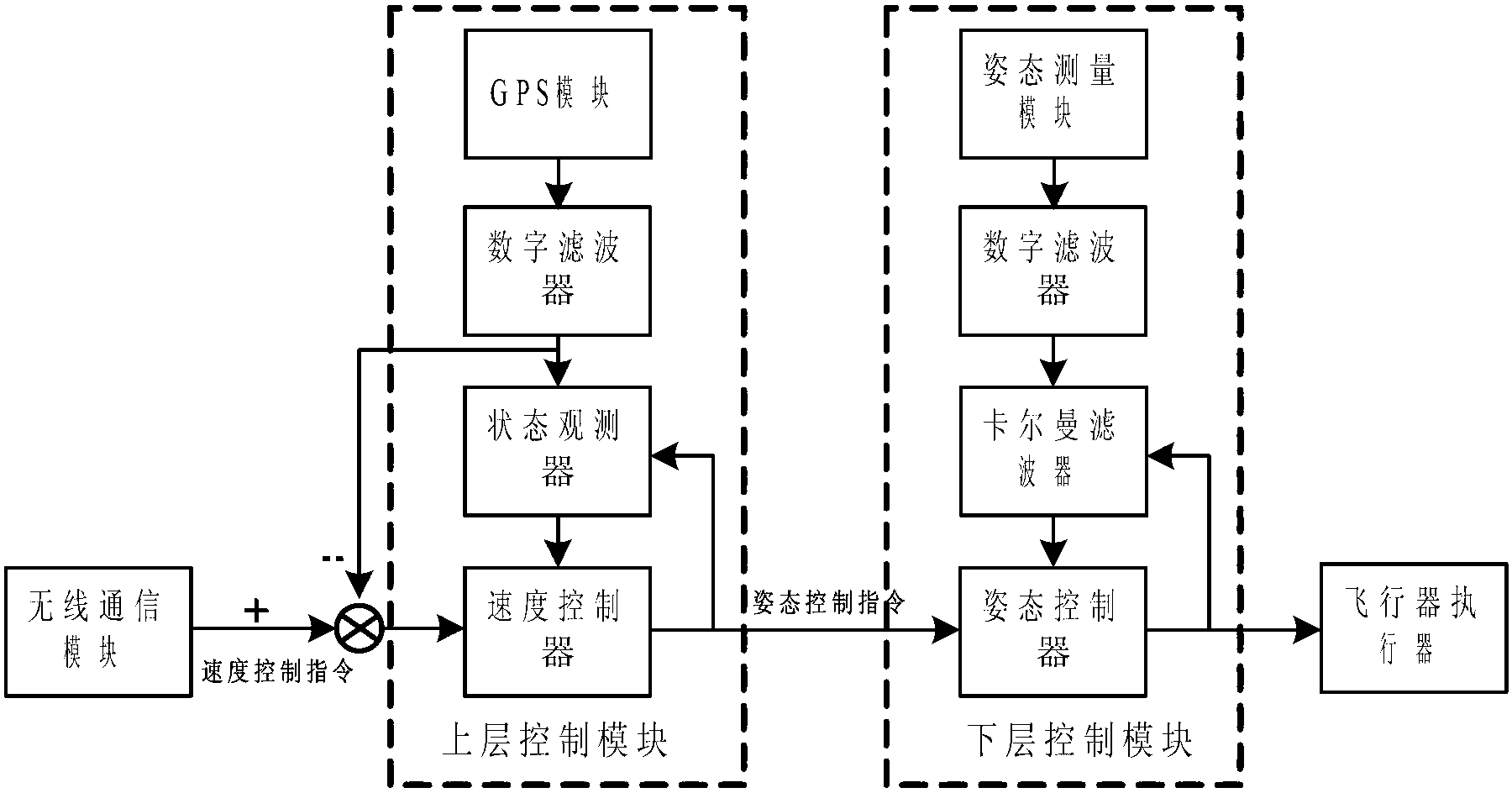
[0048] figure 1 Describe the general principle block diagram of the present invention, the present invention specifically comprises the following steps:
[0049] 1) Use the wireless communication module to obtain the aircraft speed control command given by the user;
[0050] The wireless communication module is very selective and has a variety of communication tools. The present invention uses a 2.4G X-bee pro module and a 72Mhz Tiandifei remote controller to form a wireless communication module; the remote controller can be used to manually control the flight of the aircraft, and the X-bee pro Connected to a ground computer, the aircraft can be monitored using the ground computer.
[0051] 2) The uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More