

Under-actuated biped robot walking control method
A technology of a biped robot and a control method, which is applied in the field of biped robot power walking, can solve the problems of biped robot impact and other problems, and achieves the effect of reducing energy consumption and low energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
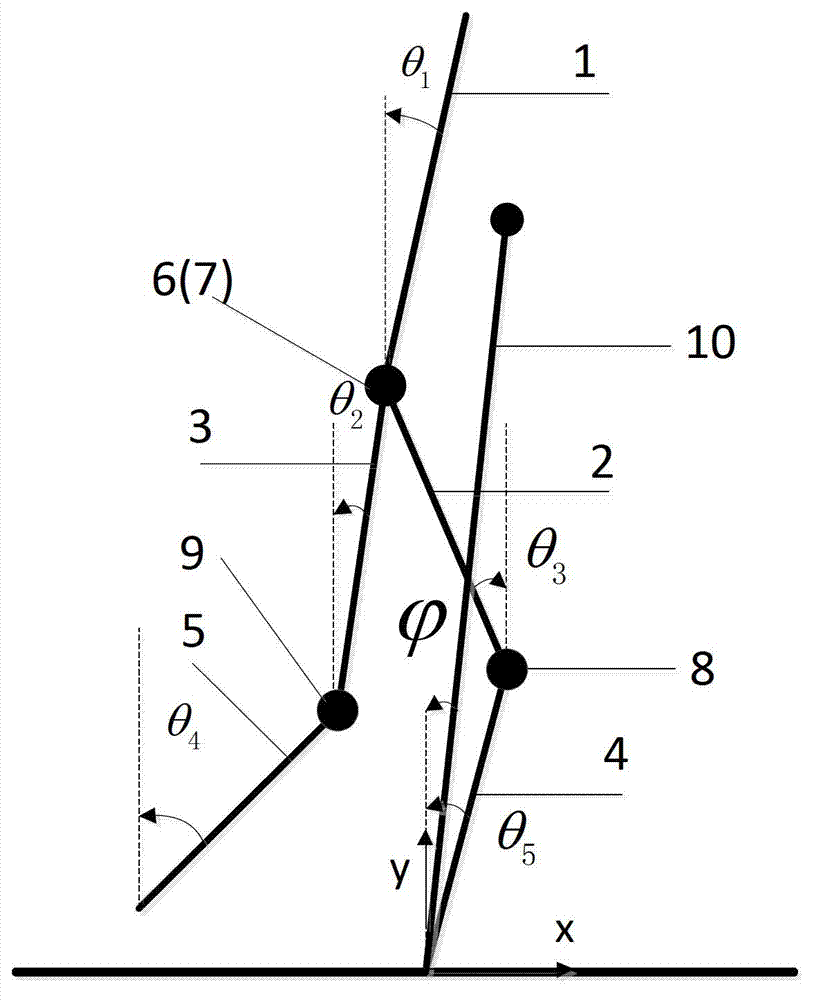
[0022] Such as figure 1 As shown, the biped robot includes a trunk 1, a first thigh 2, a second thigh 3, a first calf 4, and a second calf 5, wherein the trunk 1 is connected to the first thigh 2 through a first motor 6, and the second motor 7 is connected with the second thigh 3, the first thigh 2 is connected with the first calf 4 through the third motor 8, and the second thigh 3 is connected with the second calf 5 through the fourth motor 9. The angle between torso 1 and the vertical direction is θ 1 , the angle between the first thigh 2 and the vertical direction is θ 2 , the angle between the second thigh 3 and the vertical direction is θ 3 , the angle between the first lower leg 4 and the vertical direction is θ 4 , the angle between the second lower leg 5 and the vertical direction is θ 5 . The length and mass of the underactuated biped robot torso 1, first thigh 2, second thigh 3, first lower leg 4 and second lower leg 5 are l i and m i , i=1,2,...,5. In order ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More