RGB vector matching rapid-recognition system and method
A vector matching and recognition system technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve the problems of destroying the correlation of color images, increasing the amount of calculation, and affecting the accuracy and robustness of matching algorithms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
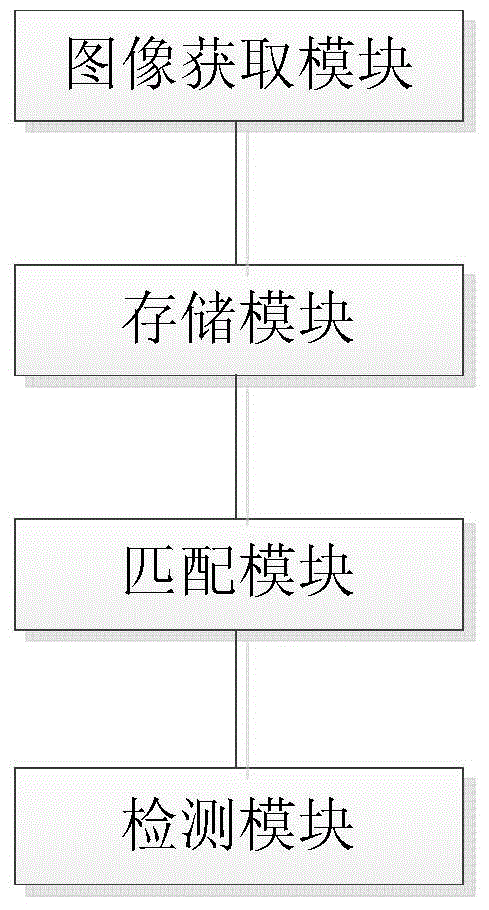
[0047] Such as figure 1As shown, a RGB vector matching fast identification system includes an image acquisition module, a storage module, a matching module and a detection module, wherein
[0048] The image acquisition module is a single-lens color light source stereo vision system, which is used to acquire images to be recognized, wherein the single-lens color light source stereo vision system is a single-lens three-ring special color light source structure, and increases chromaticity information;
[0049] A storage module, used to store template images and acquired images to be identified;
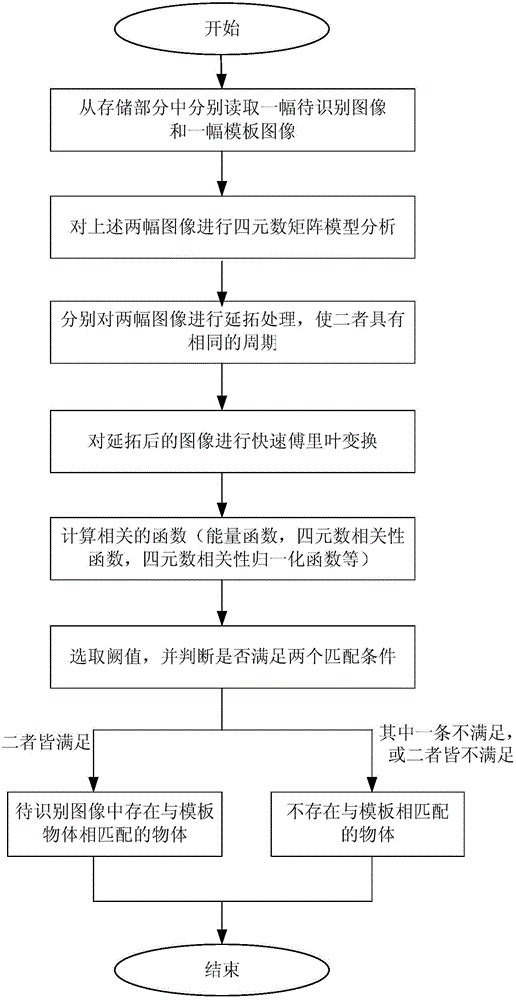
[0050] The matching module is used to move the template image, search for units that match the template image in the image to be recognized, and use quaternion correlation to determine whether there is an object with the same shape, size, color and brightness as the template object: first use The quaternion matrix model describes the image to be recognized, that is, the color value of e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com