

Two-translational-motion parallel robot
A robot and two-translation technology, applied in the field of robots, can solve problems such as high speed, heavy load, and slow movement speed, and achieve the effects of small inertia, high speed acceleration, and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
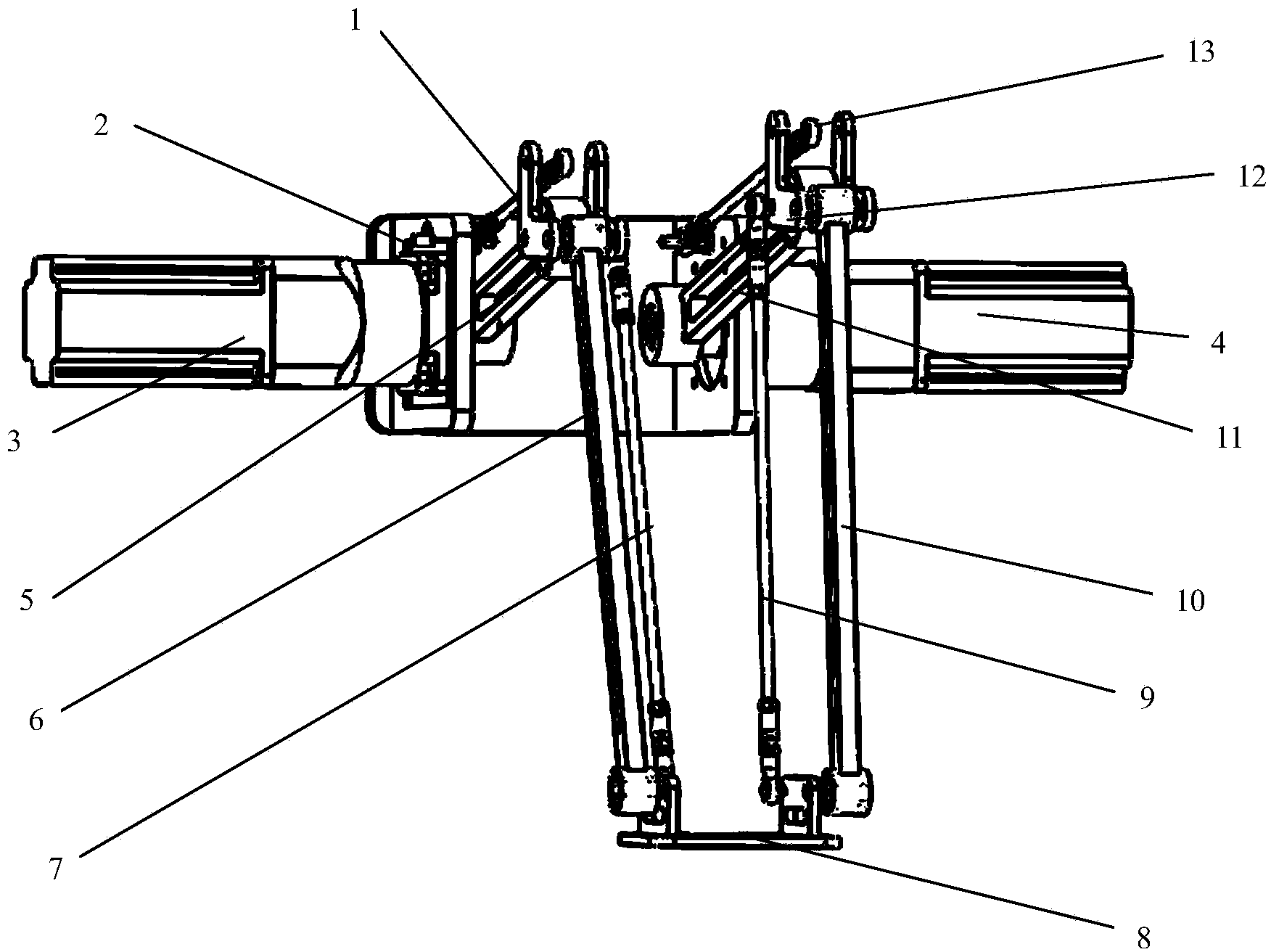
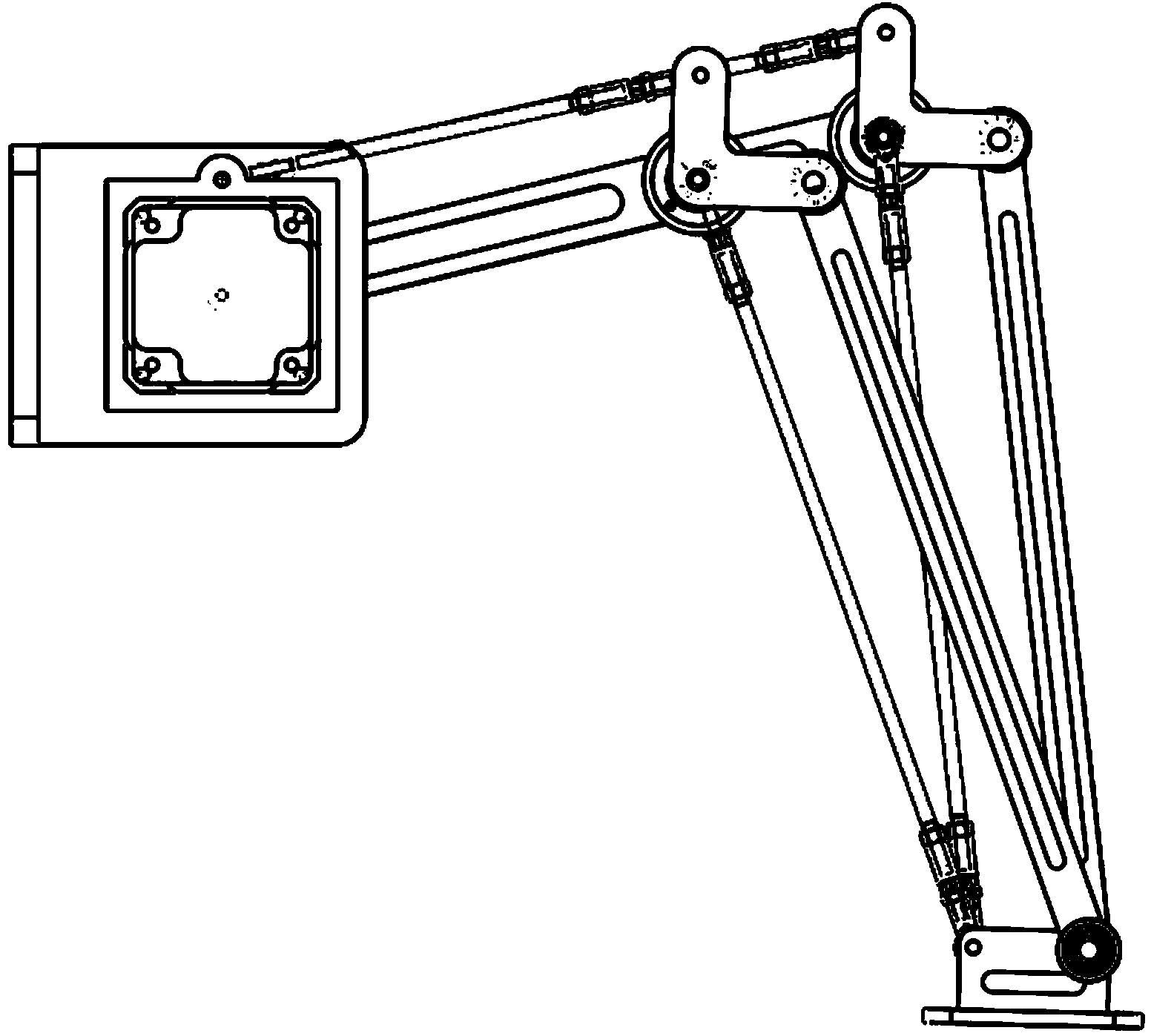
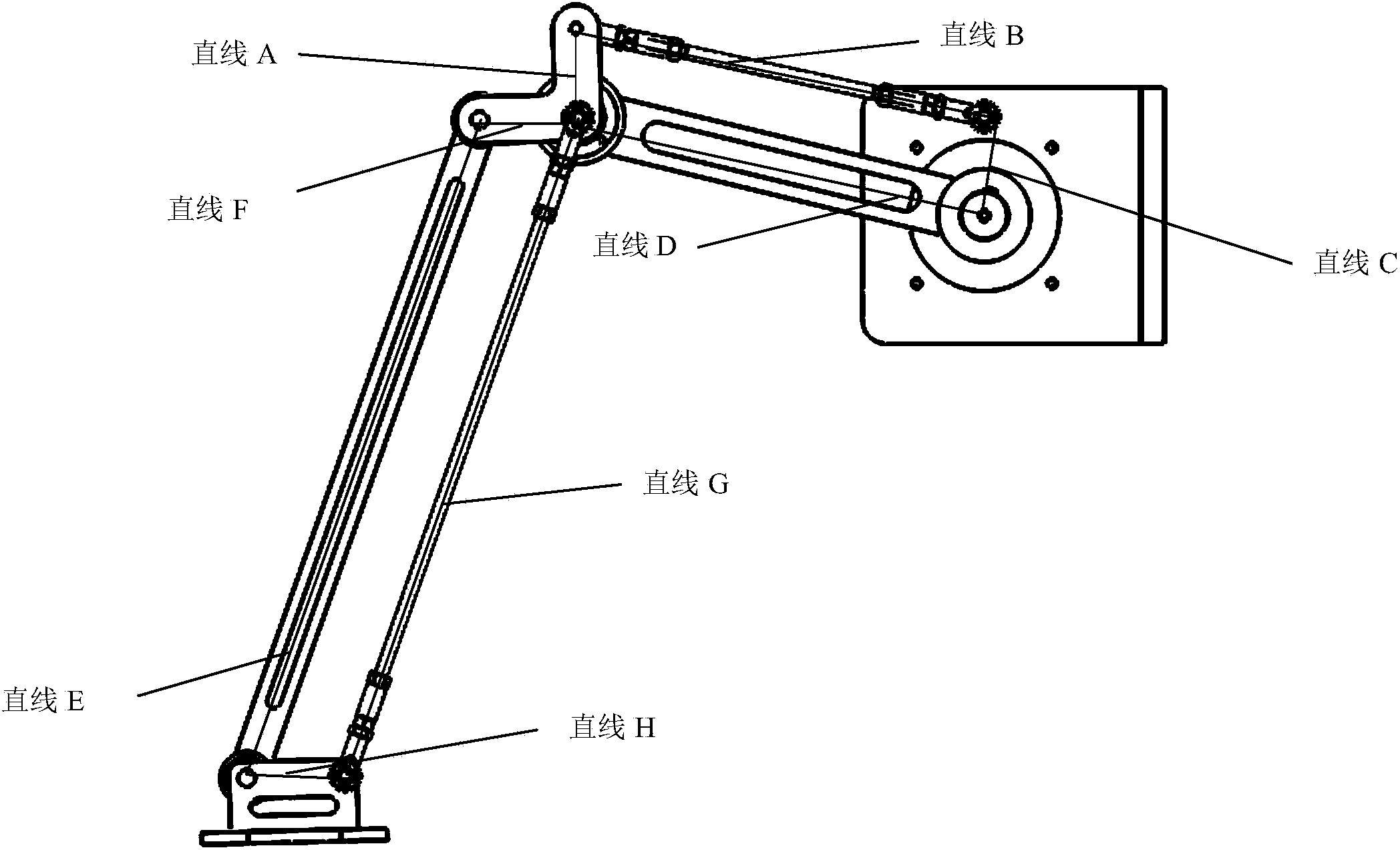
[0018] like figure 1 , figure 2 , image 3 , Figure 4 As shown in , a two-degree-of-freedom translational parallel robot consists of a frame 2, a driving device, a motion branch chain and a moving platform 8. The moving platform 8 forms a closed-loop parallel structure with the frame 2 through the motion branch chain; the motion branch chain includes a first branch chain and a second branch chain; the first branch chain and the second branch chain are respectively rotated The movable platform 8 is connected by a hinge; the first branch chain and the second branch chain jointly drive the movable platform to move in translation, and the first branch chain and the second branch chain constrain the three rotational degrees of freedom and one translational freedom of the movable platform 8 Spend.
[0019] See figure 2 , image 3 , Figure 4 , as shown, the first branch chain is composed of the first active arm link 1, the first active arm 5, the first follower arm 6 and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More