

Multifunctional mechanical arm for helping physically-challenged people
A manipulator and multi-functional technology, applied in the field of manipulators, can solve the problems of high price, single function, and difficulty, and achieve the effects of wide application range, improved clamping reliability, and reduced manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
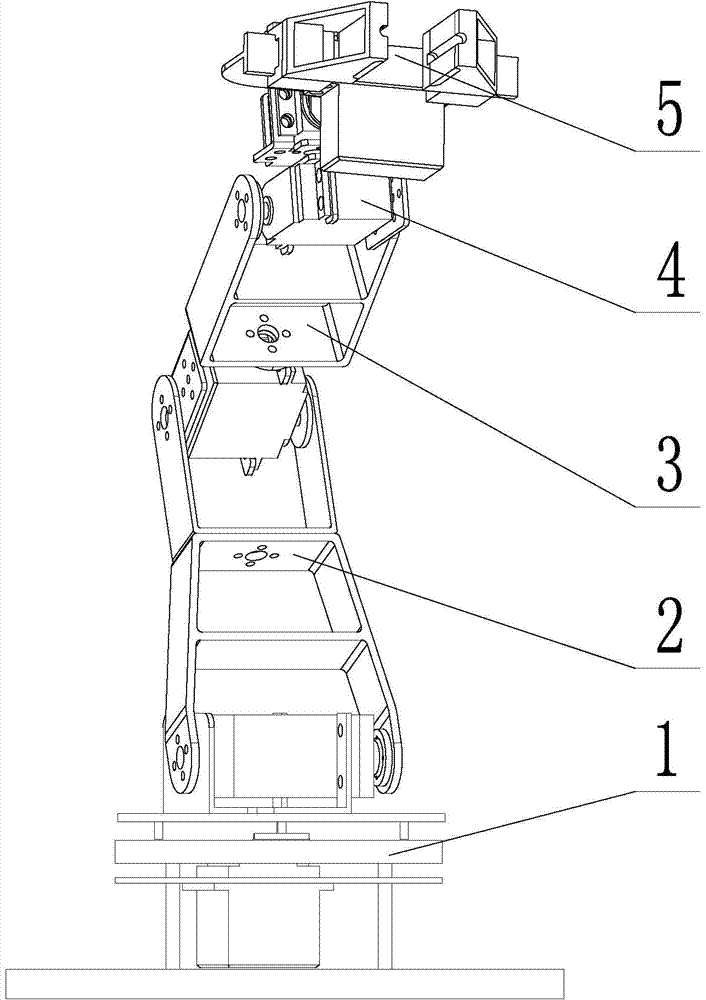
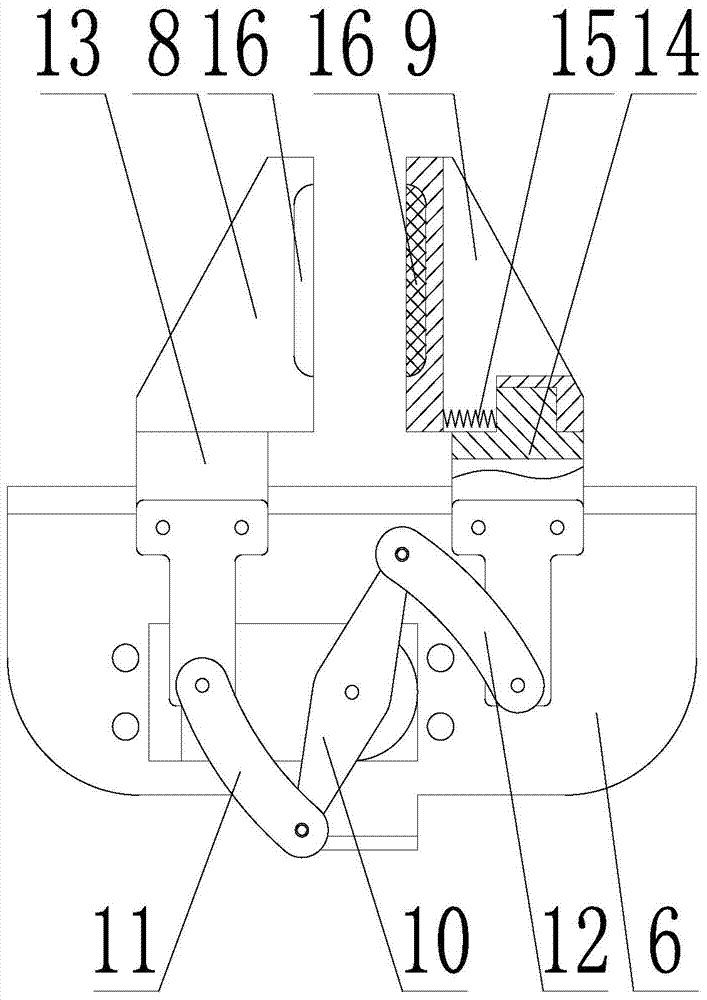
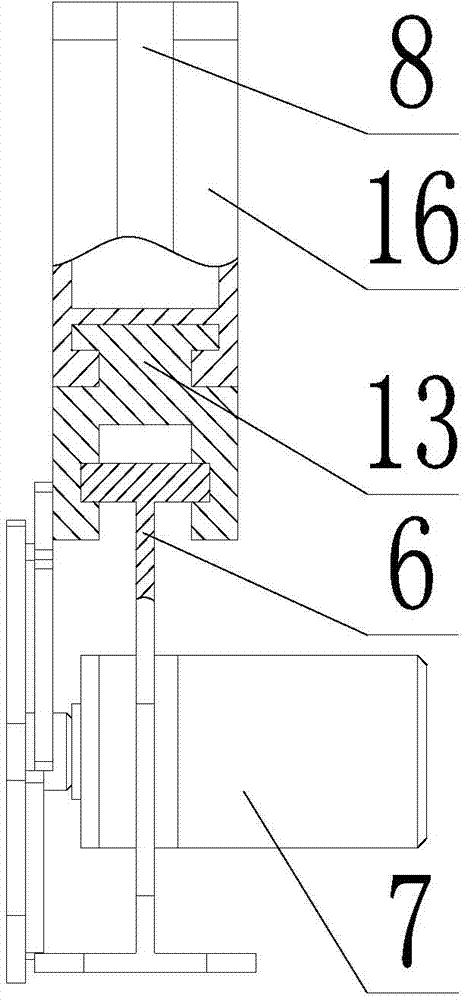
[0018] like figure 1 , 2 As shown in , 3, a kind of multifunctional disabled manipulator comprises support plate 1, big arm 2, forearm 3, wrist 4 and hand claw 5, and described big arm 2 one end is connected with support plate 1, and big arm 2 other end is connected with support plate 1. One end of the forearm 3 is connected, the other end of the forearm 3 is connected with the wrist 4, and the wrist 4 is connected with the gripper 5; the gripper 5 includes a substrate 6, a steering gear 7, a first clamping finger 8 and a second clamping finger 9 , a first slideway is provided on one side of the base plate 6, a first slider 13 is connected to the lower part of the first clamping finger 8, and a second slider 14 is connected to the lower part of the second clamping finger 9, The first clamping finger 8 slides with the substrate 6 thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More