

System for adjusting torque required by robot driving device
A driving device and robot technology, applied in the field of mobile robots, can solve the problems of high torque requirements of rotary joint drives, inability to adjust the center of gravity and moment of inertia, fixed main structure, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
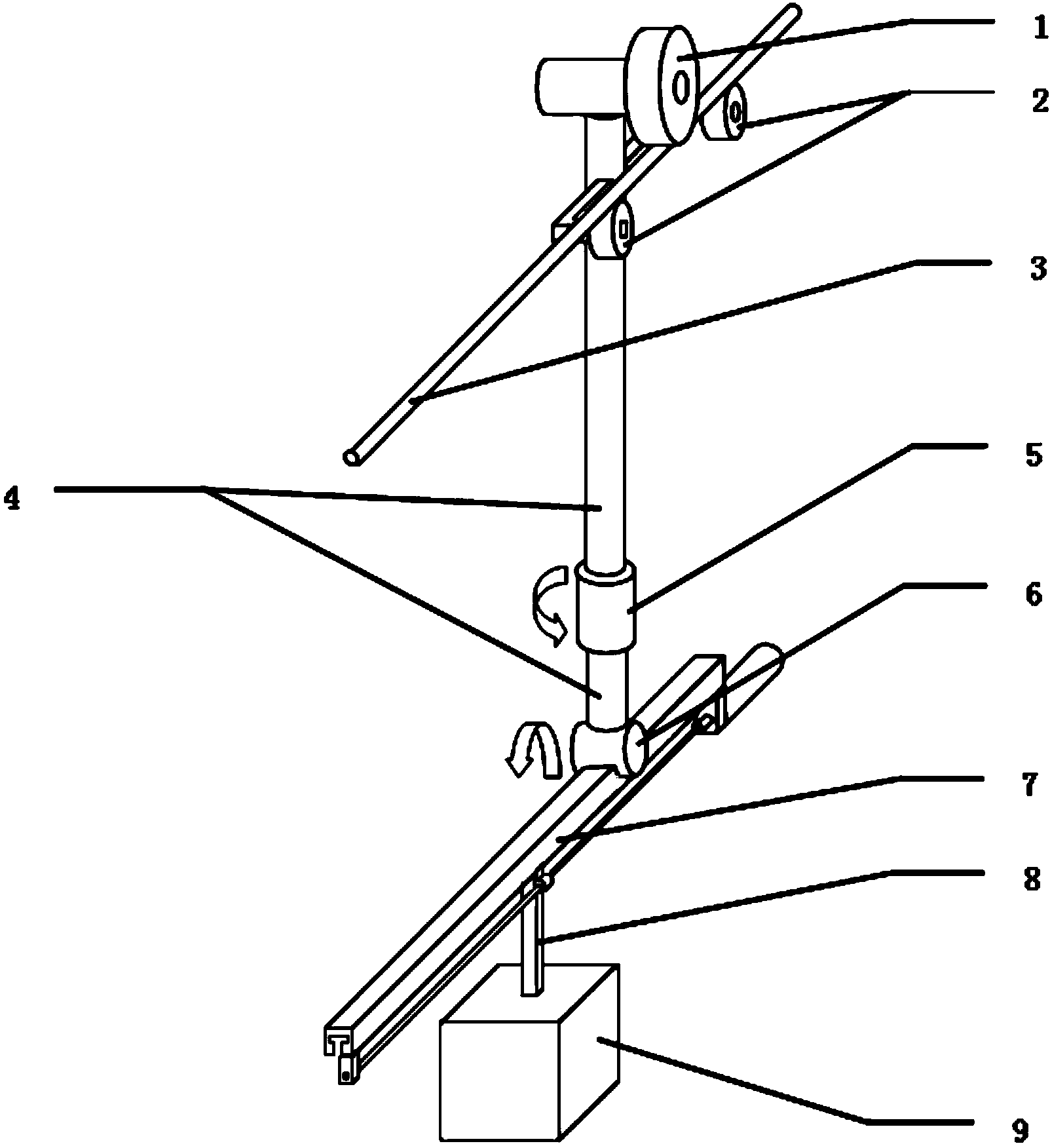
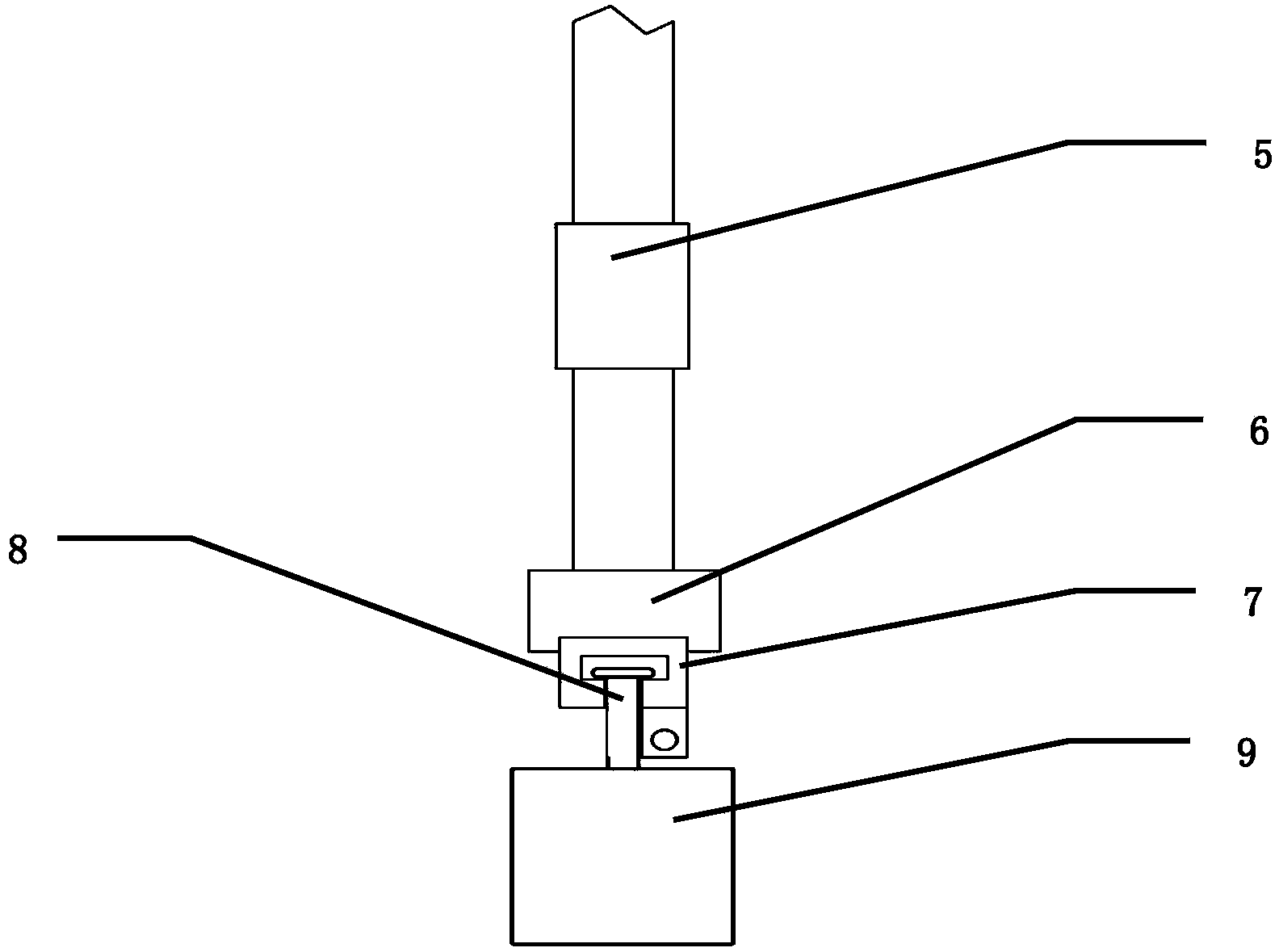
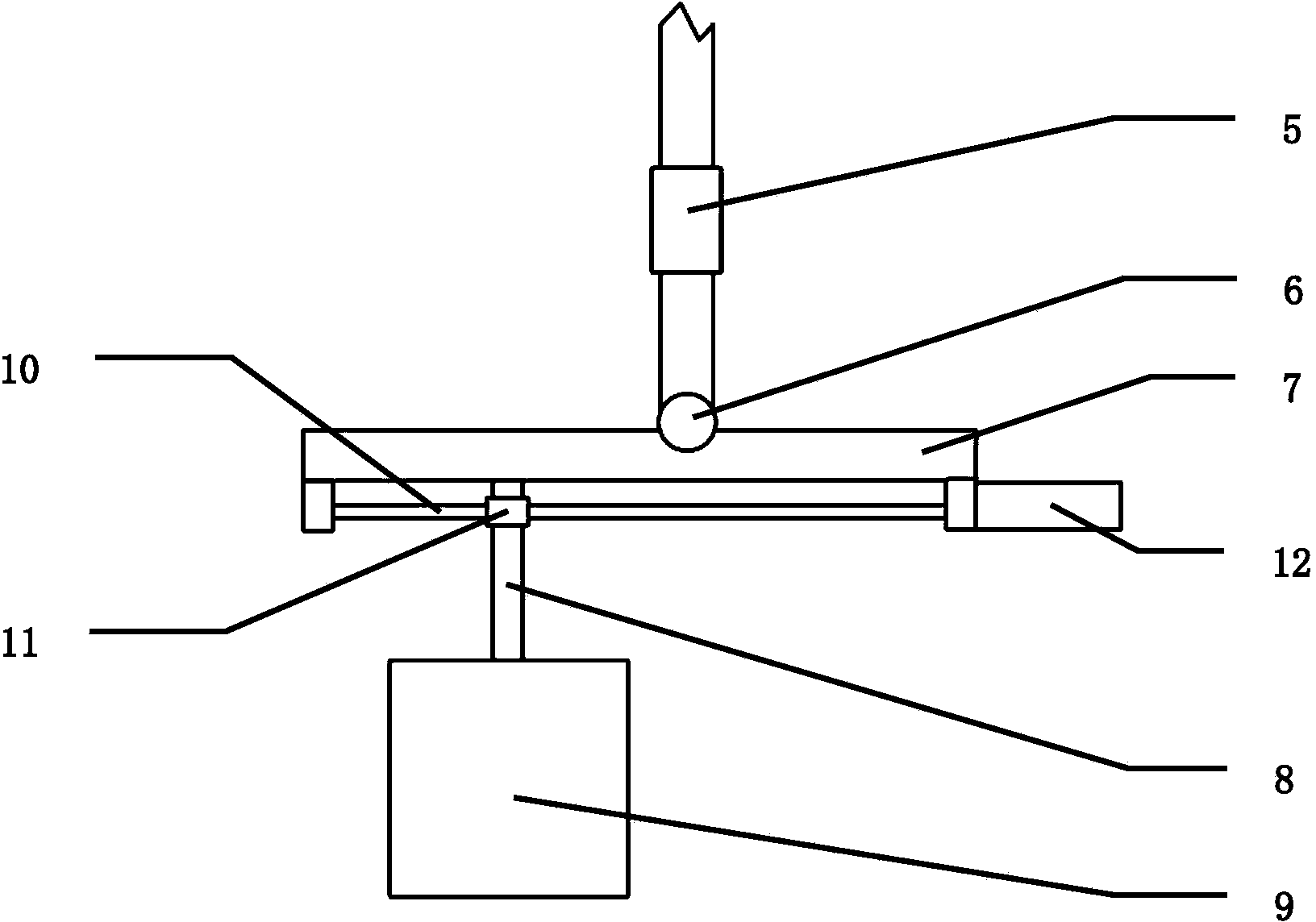
[0020] The system for adjusting the moment of inertia of a single-arm suspended mobile robot and the torque required for driving components by adjusting the center of gravity provided by the present invention includes: a counterweight, a counterweight support part and a counterweight moving part, and the counterweight block passes the counterweight The support part is connected with the counterweight moving part, and the counterweight can change position within the robot structure.
[0021] The counterweight is a rigid box, and components such as power supply and controller are fixedly installed inside, and the counterweight bears the weight of the main body of the robot structure. Components such as power supply and controller are placed symmetrically in the counterweight box to ensure a compact overall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More