

Reconfigurable robot end effector assembly
A technology of end effectors and components, applied in the direction of manipulators, circuits, connections, etc., can solve the problems of packaging size, adjustability and weight that are not ideal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
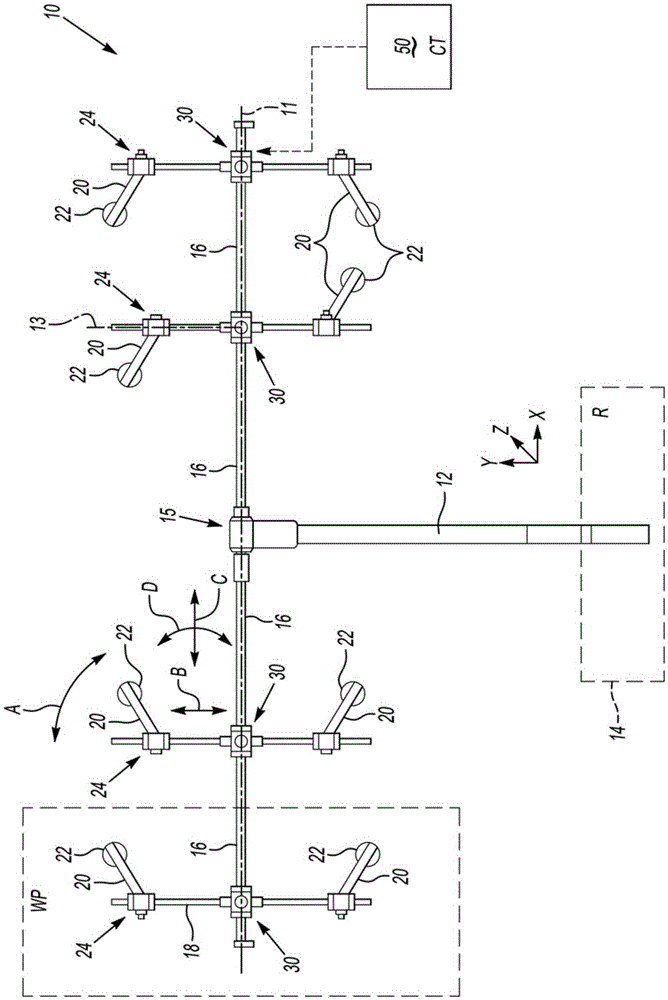
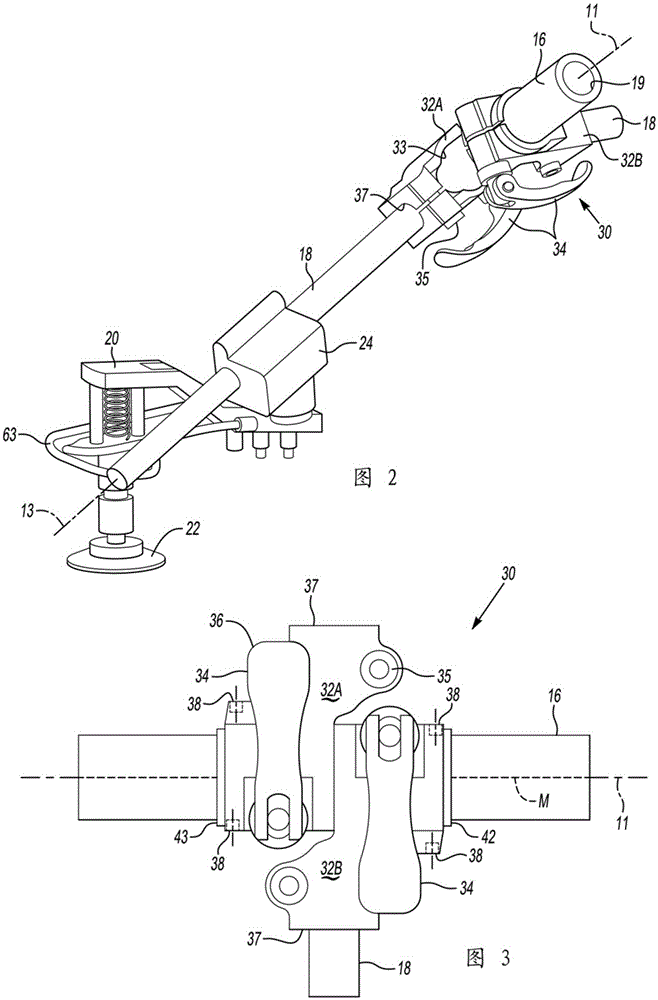
[0015] Referring to the drawings, wherein like reference numerals refer to like parts throughout, a reconfigurable end effector assembly 10 is schematically shown at figure 1 middle. End effector assembly 10 includes a main arm 12 connected via a T-fitting 15 or other suitable connector to a support arm 16 having a longitudinal axis 11 . The arm 16 may have an inner wall 19, such as figure 2 and 4 shown in . The main arm 12 can be positioned anywhere in the Cartesian (xyz) frame of reference (i.e., free space) as desired by the robot (R) 14, such as a multi-axis material handling robot of the type commonly used in manufacturing facilities for logistics purposes . As is well understood in the art, such a robot 14 is programmable, fixed to a stationary or movable base, and configured to position the main arm 12 with respect to the workpiece (WP) as desired.
[0016] The support arm 16 of the end effector assembly 10 extends orthogonally with respect to the main arm 12 thro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More