

Angular momentum control method of spacecraft in inertial system
A control method and spacecraft technology, which is applied in the direction of aerospace vehicle guidance devices, etc., can solve the problems of large difference in the main inertial axis, inability to generate sufficient gravity gradient moment, inability to control angular momentum, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The specific embodiments of the present invention will be further introduced below with reference to the accompanying drawings.
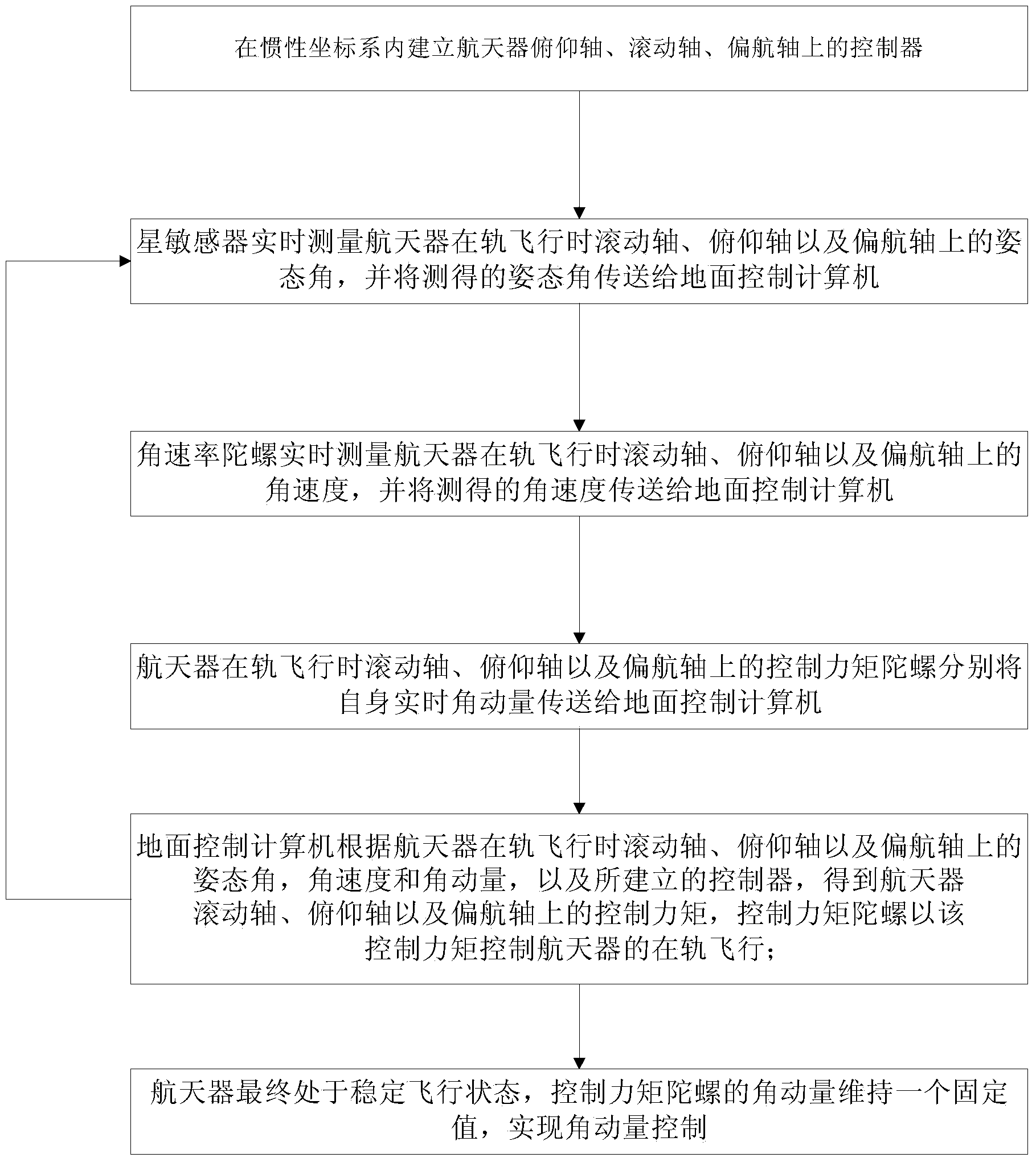
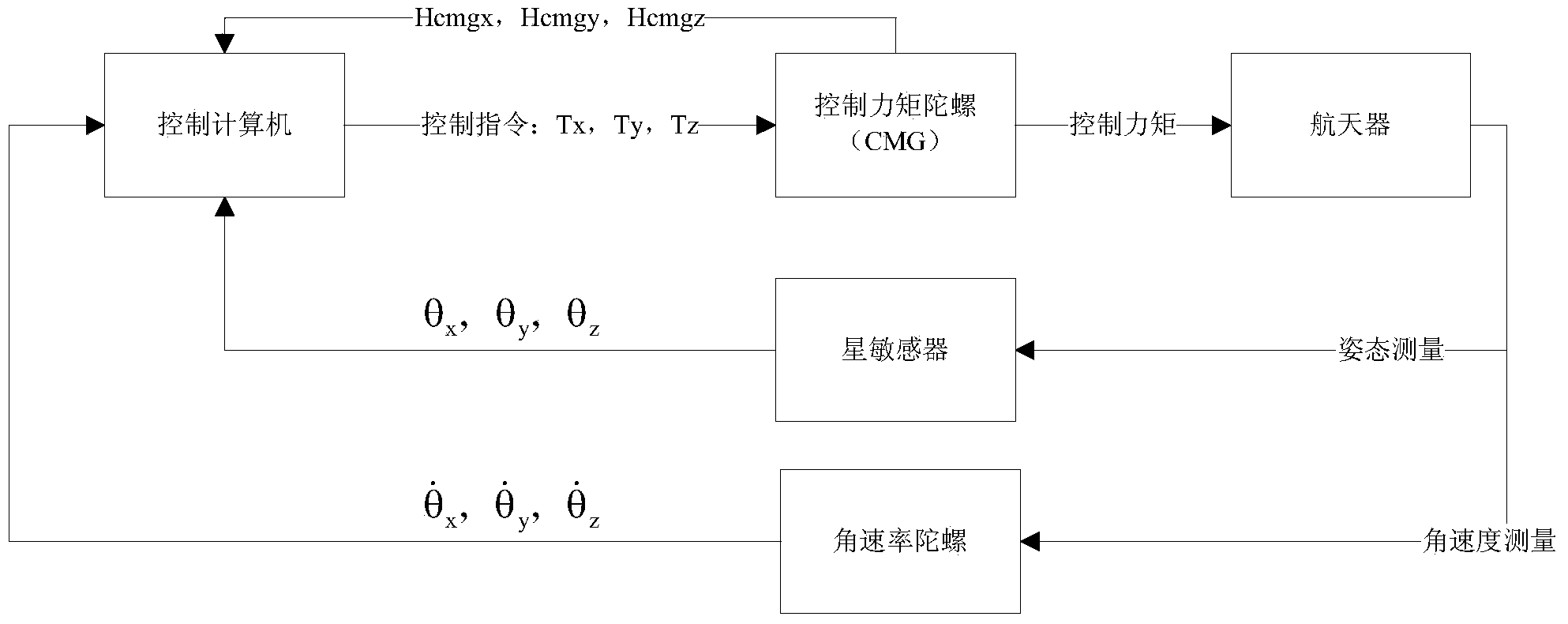
[0033] like figure 1 Shown is the flow chart of the method of the present invention, such as figure 2 Shown is the circuit diagram of the control system of the present invention. combine figure 1 and figure 2 , the method flow of the present invention is as follows:
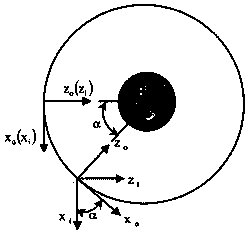
[0034] (1) Establish controllers on the pitch axis, roll axis, and yaw axis of the spacecraft in the inertial coordinate system, in the following form:
[0035] T x = - k xi ∫ θ x dt - k xp θ x - k xd θ · x - k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More