Remote monitoring system for elevator
A remote monitoring system and remote monitoring technology, applied in elevators, transportation and packaging, etc., can solve problems such as poor timeliness and reliability, neglect of alarms, and the need for manual alarms, etc., to achieve the effect of ensuring safe operation and convenient discovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Embodiments of the present invention will now be described with reference to the drawings, in which like reference numerals represent like elements.
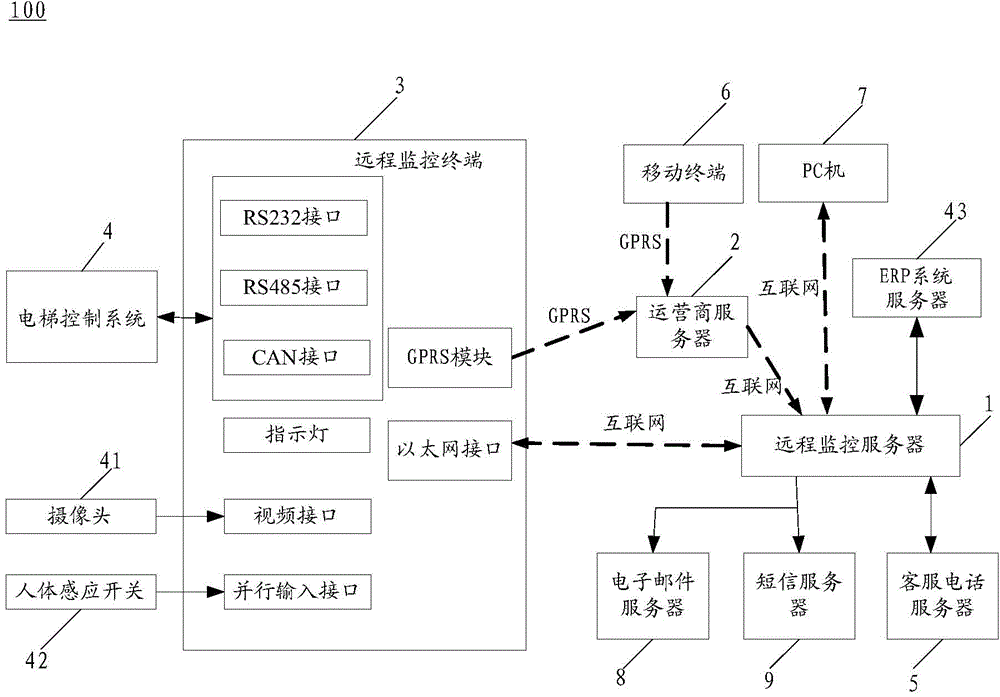
[0042] Please refer to figure 1 The elevator remote monitoring system 100 of the present invention includes a remote monitoring server 1, an operator server 2 (such as an operator data center server), a plurality of remote monitoring terminals 3 and a corresponding elevator control system 4, a customer service telephone server 5, and a mobile terminal 6 ( Such as mobile phone, ipad, etc.), PC 7, email server 8, short message server 9, camera 41, human body sensor switch 42 and ERP system server 43, wherein customer service telephone server 5, mobile terminal 6, PC 7, email server 8, short message server 9 and ERP system server 43 are all connected with remote monitoring server 1, camera 41 and human body sensor switch 42 are connected with remote monitoring terminal 3, each elevator control system 4 is connected with corr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More