

Motion Path Compensation Method of Manipulator Based on Vision Measurement
A compensation method and motion path technology, applied in manipulators, manufacturing tools, etc., can solve problems such as bruises or scratches on spacecraft products, difficult installation work, and small installation space, so as to achieve safer and more reliable motion, solve assembly problems, High safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The method for compensating the motion path of the manipulator based on vision measurement of the present invention will be further described below in conjunction with the accompanying drawings. This description is only exemplary and not intended to limit the protection scope of the present invention.
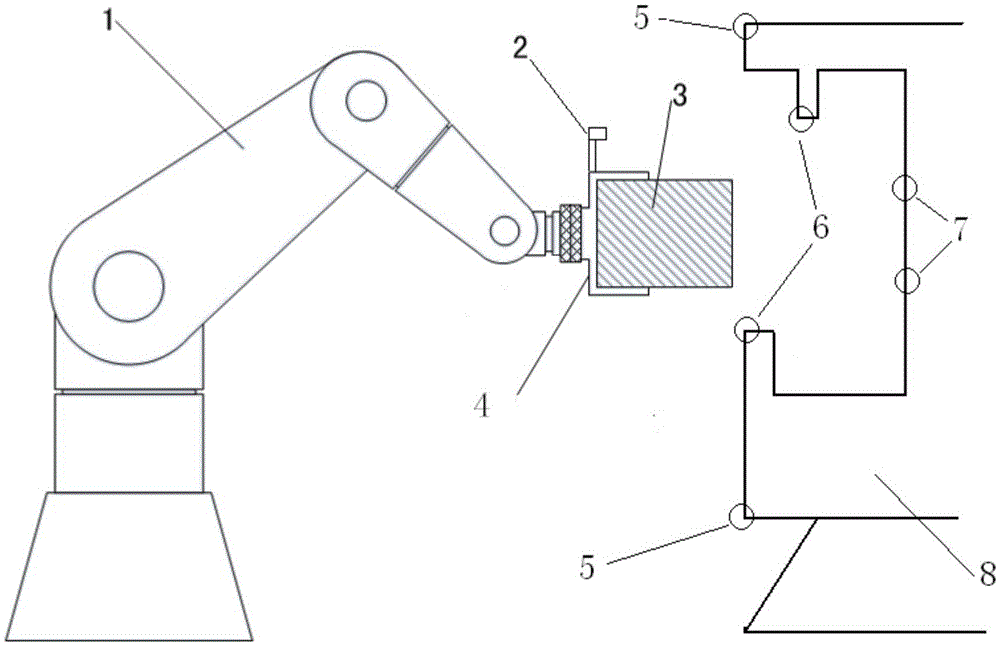
[0038] see figure 1 , figure 1 It shows the operation process of applying the robotic arm based on vision measurement of the present invention to the assembly of spacecraft, wherein the binocular vision sensor 2 is installed on the end effector 4 of the robotic arm 1, and the workpiece 3 to be assembled is clamped by the end effector 4, The target assembly position of the workpiece 3 to be assembled is at the characteristic point 7 of the internal target assembly position of the spacecraft 8 , and the mechanical arm 1 must go deep into the interior of the spacecraft 8 along the way, and avoid collision with the characteristic point 6 of the protrusion of the spacecraft. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More