

A Modeling and Solving Method for Manipulator Based on Improved Transfer Matrix of Multibody System
A transfer matrix and multi-body system technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve difficult problems such as kinematics and dynamics unification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0065] Embodiment 1, mechanical arm dynamics modeling
[0066] In order to describe in detail the improvement of the multi-body system transfer matrix method of the present invention and its application to the technical method of modeling and solving the dynamics of the manipulator, the following is an example of a two-degree-of-freedom serial manipulator in planar motion. The specific steps are as follows:
[0067] 1. Disassemble the robotic arm system
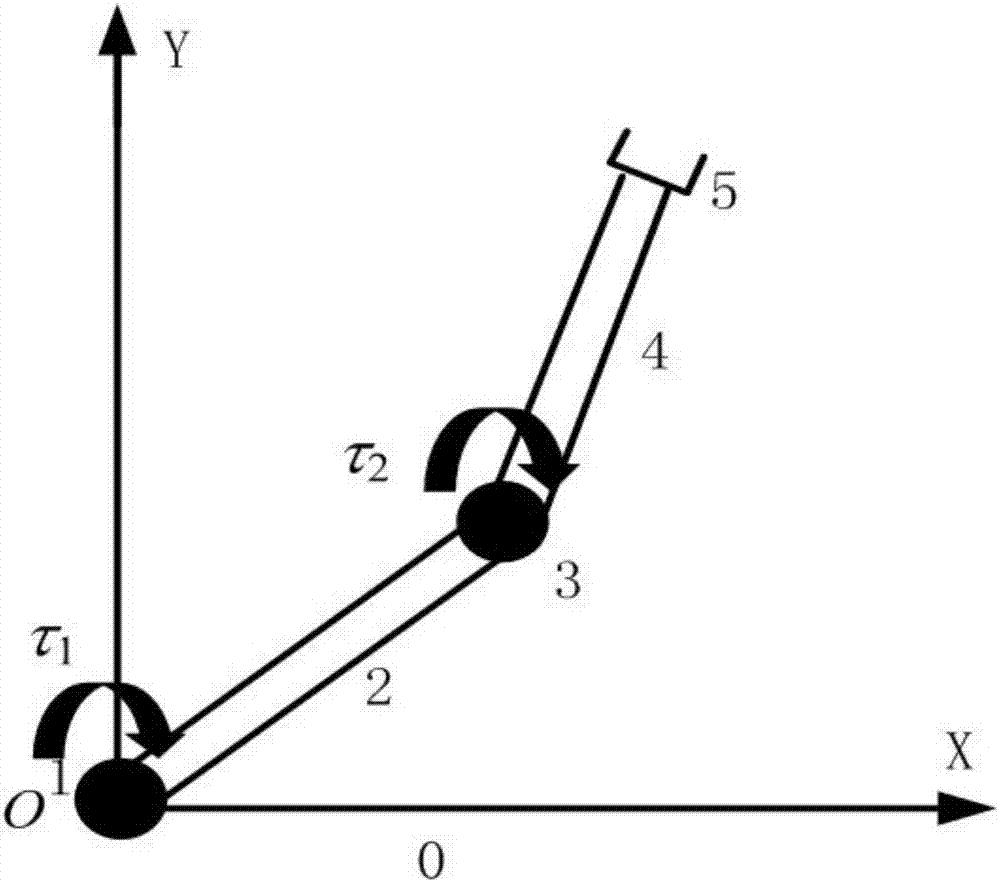
[0068] Such as figure 1 Shown is a two-degree-of-freedom planar motion manipulator. The rigid body system is decomposed, and the whole manipulator is a chain system composed of four planar rigid body elements with one end input and one end output. In the figure, number 0 represents the base, starting from the base, the first and third rigid bodies represent joints, the second and fourth rigid bodies represent rods, and the number 5 represents the end of the mechanical arm. According to the modeling idea of discrete time t...
Embodiment 2
[0090] Embodiment 2, the solution of model
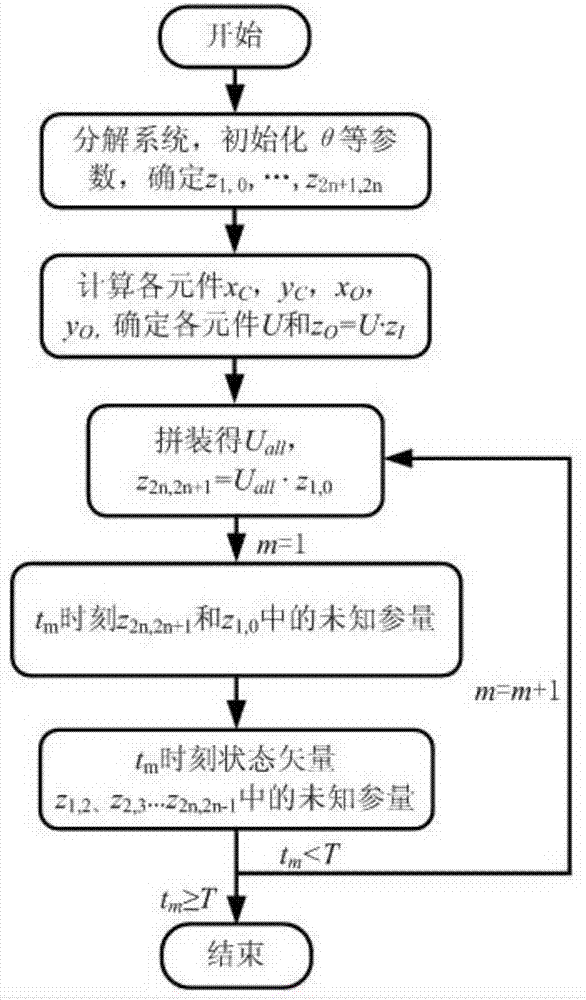
[0091] For a series multi-joint manipulator, there are two situations according to the kinematics law, one is to solve the terminal information with the known joint motion law, that is, forward kinematics solution; the other is to solve the joint information with the known end point motion law , belongs to the kinematics inverse solution problem. For the overall equation of dynamics of the two-degree-of-freedom manipulator shown in formula (5), the solution to any of the above-mentioned motion situations needs to set the boundary conditions of the overall equation according to the known and unknown conditions, and then through the iteration of the transfer matrix Get the unknown parameters of each state vector. These parameters contain all the information about the position and force of each joint and rod in the manipulator, so the solution of the two motion situations is the superposition of the kinematics problem and the inverse ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More