

Pole-climbing robot
A robot and pole-climbing technology, applied in the field of pole-climbing robots, can solve problems such as low efficiency, falling of pole-climbing robots, and complex structures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the invention.
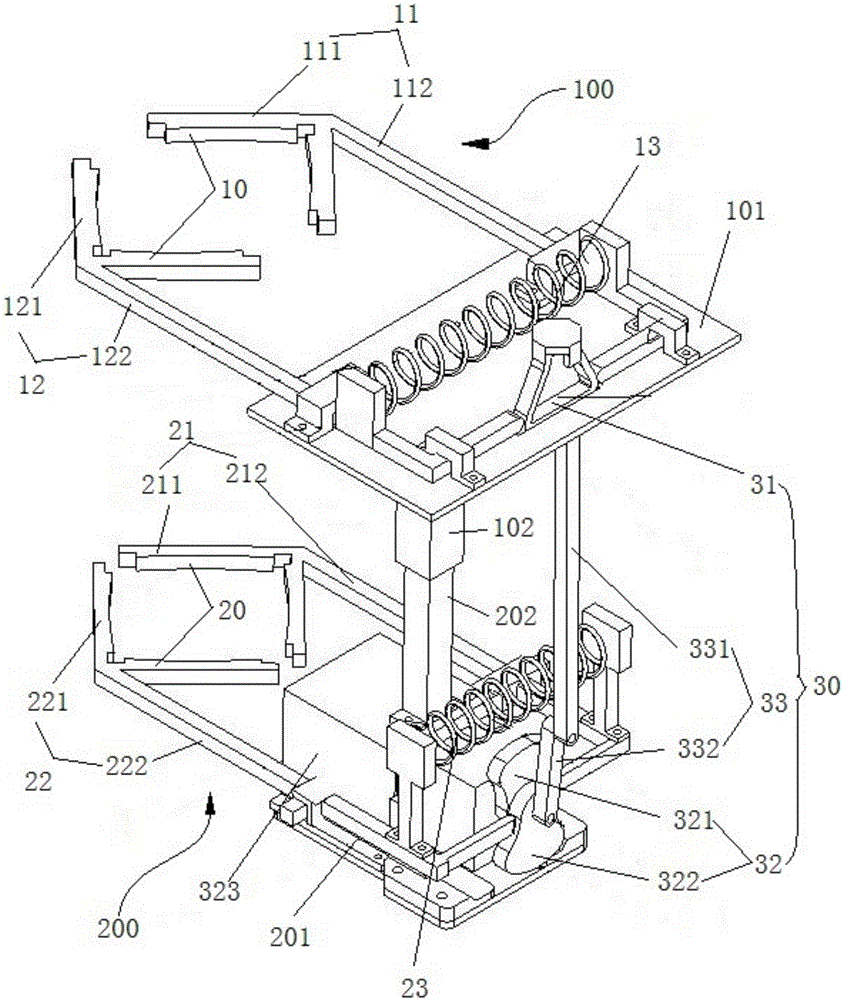
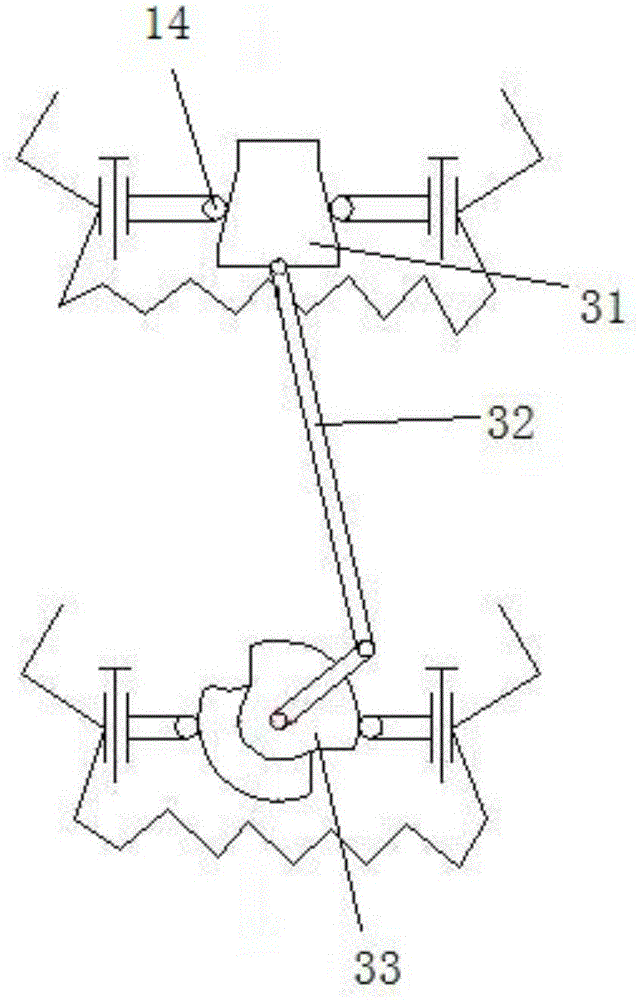
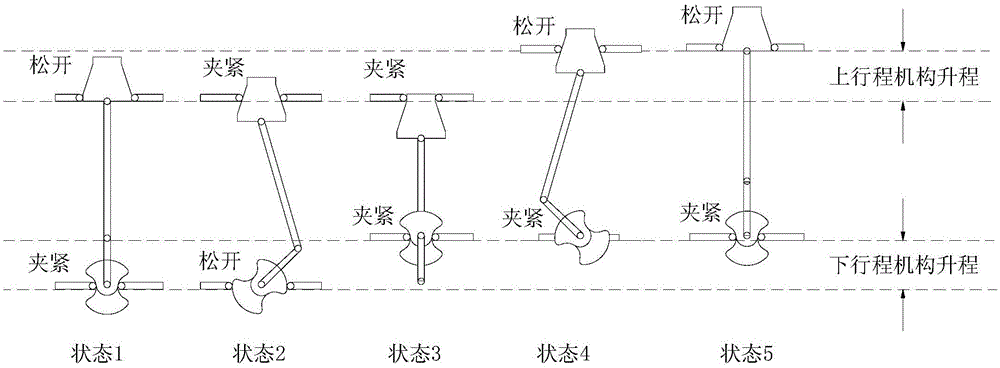
[0015] like figure 1 As shown, the present invention provides a pole climbing robot, which includes an upstroke mechanism 100 and a downstroke mechanism 200, and the upstroke mechanism 100 and the downstroke mechanism 200 include an upper elastic claw device 10 and a lower elastic claw device 20 respectively. , a stroke pushing device 30 is provided between the upper elastic claw device 10 and the lower elastic claw device 20, and the stroke pushing device 30 includes,
[0016] A driven cam 31, the width of the driven cam 31 gradually increases from top to bottom, and the upper elasti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More