

User indoor motion trajectory matching method based on imu data
A technology of motion trajectory and matching method, which is applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve the problems of unknown start position and end position, indoor motion trajectory cannot match positioning, etc., and achieve the effect of matching positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0017] Specific implementation mode one: refer to Figure 5 Specifically describe this embodiment, the IMU data-based method described in this embodiment
[0018] A user indoor motion trajectory matching method, which includes the following steps:
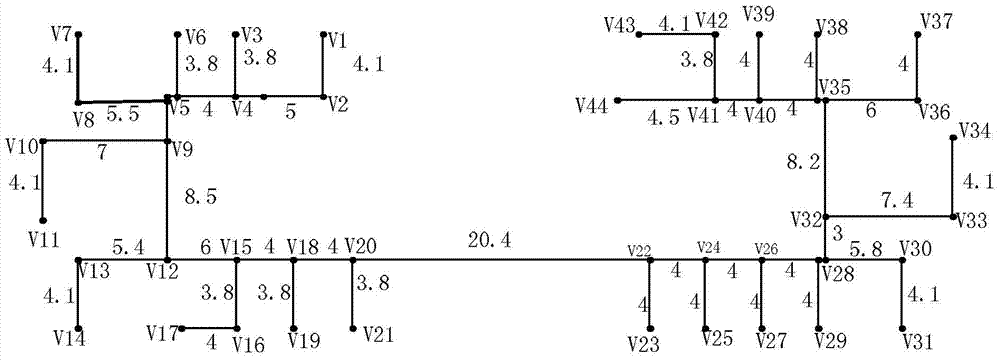
[0019] Step 1, using nodes to form an indoor reference map;
[0020] Step 2. Obtain the corner matrix GD of the indoor reference map and the weight matrix W of the indoor reference map according to the indoor reference map;
[0021] Step 3: Use the IMU data to obtain the indoor motion trajectory, obtain the corner direction and the distance matrix TD between adjacent nodes according to the indoor motion trajectory, match the indoor motion trajectory with the indoor reference map, and obtain the indoor reference map that contains the indoor motion trajectory Trajectory set A with the same number of nodes;
[0022] Step 4. Exclude the trajectory of repeated points from the trajectory set A in step 3, and obtain the trajectory set ...
Embodiment
[0030] Assume that the indoor motion trajectory of the user obtained from the IMU data is as follows: Figure 4 As shown, w 1 、w 6 Indicates the starting point and ending point of the user's movement, w 2 -w 5 Indicates the corner point during the user's movement. Let the left turn be -1, and the right turn be 1, which is recorded as the corner direction Direction=[-1 -1 -1 -1]. The red numbers between two adjacent points indicate the distance between the two points, recorded as TD=[812 47 12 13].
[0031] For the matching between the user's indoor motion trajectory and the reference map, the matching result of the user's indoor motion trajectory in the reference map should be a trajectory with a similar shape, assuming TR(v a ,v b ,v c ,v d ,v e ,v f ), where v a , v b , v c , v d , v e , v f respectively with Figure 4 The node w in the user's indoor motion trajectory in 1 、w 2 、w 3 、w 4 、w 5 、w 6 Corresponding. Then this trajectory TR(v a ,v b ,v c...
specific Embodiment approach 2
[0084] Specific embodiment 2: This embodiment is to further explain the user indoor motion trajectory matching method based on IMU data described in specific embodiment 1. In this embodiment, in step 1, the method of using nodes to form an indoor reference map is as follows:
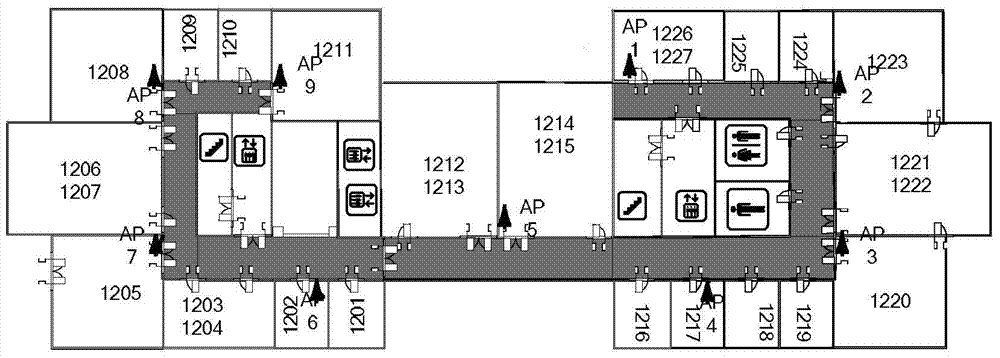
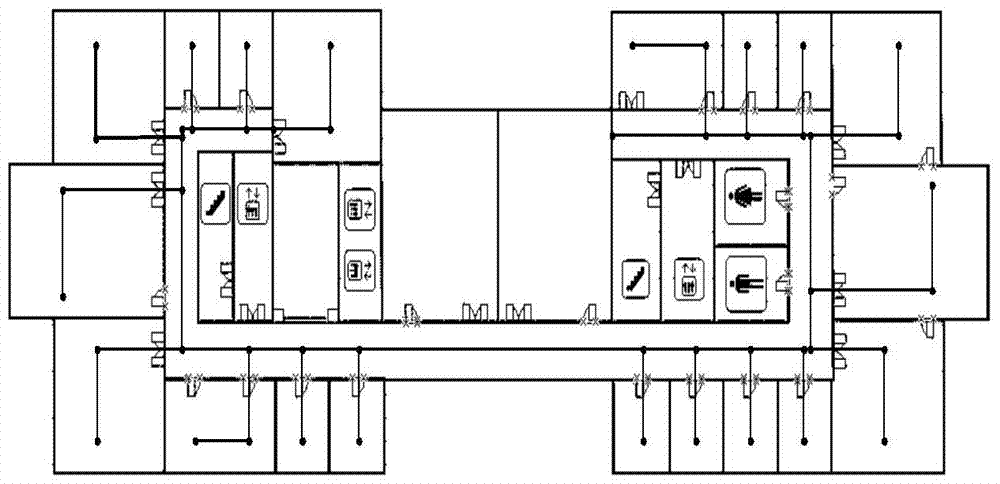
[0085] Use MATLAB software to process the indoor floor plan, select nodes including 1-2 points selected for each room, intersection points between corridors and rooms, corners, and starting and ending points of corridors, and connect lines between points to generate a topology map. Number all points and mark the distance to get a reference map.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More