

A method and device for local feature extraction of three-dimensional point cloud
A local feature and three-dimensional point cloud technology, applied in computer parts, instruments, calculations, etc., can solve the problems of inaccurate estimation, easy ambiguity of local features, and the accuracy needs to be improved, so as to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
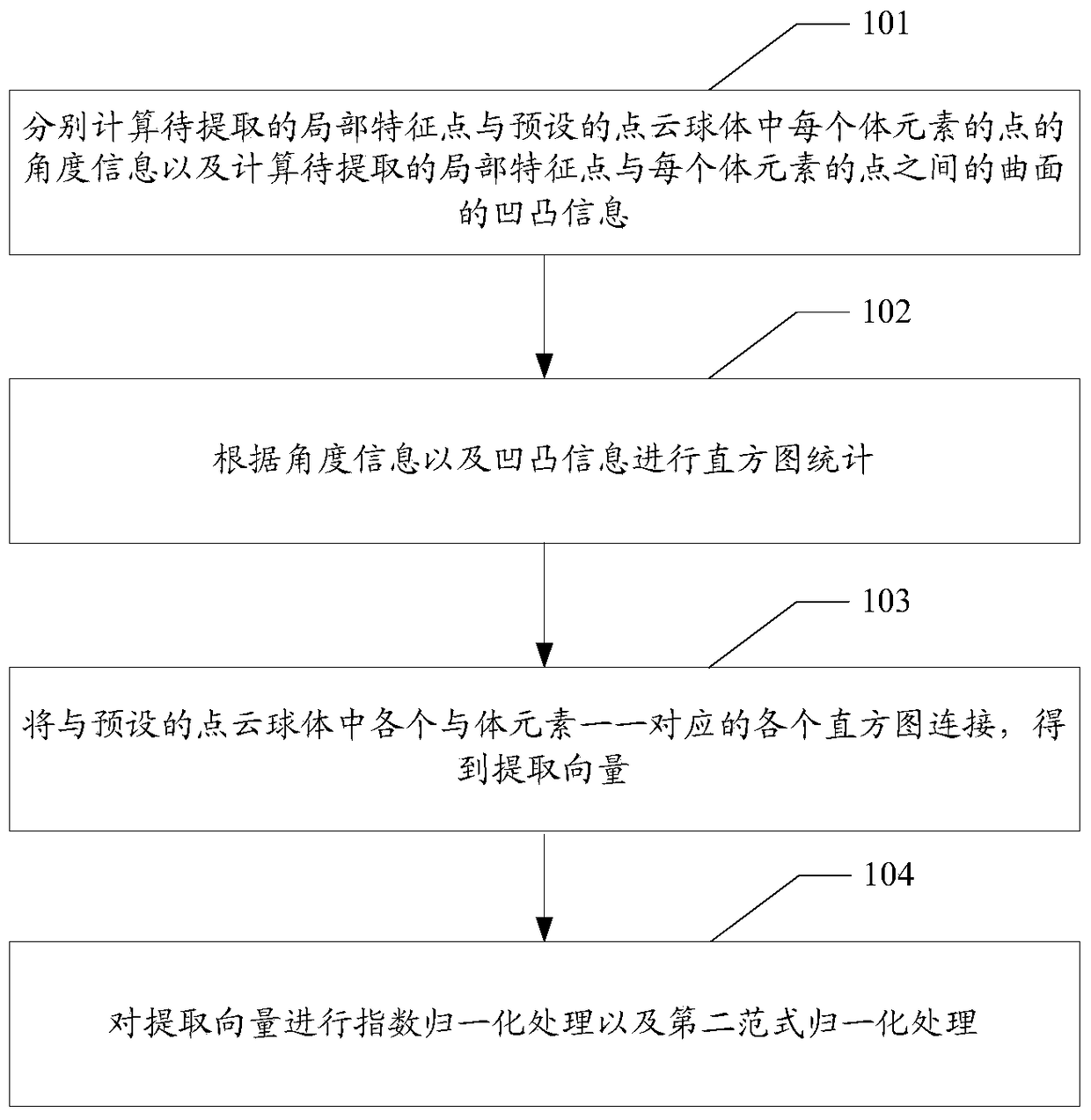
[0027] Please refer to figure 1 , figure 1 It is a flowchart of a method for extracting local features of a 3D point cloud according to an embodiment of the present invention. Such as figure 1 As shown, a local feature extraction method of a 3D point cloud may include the following steps:
[0028] 101. Calculate the angle information between the local feature point to be extracted and the point of each voxel in the preset point cloud sphere, and calculate the concave-convex information of the curved surface between the local feature point to be extracted and the point of each voxel.
[0029] Wherein, the preset point cloud sphere contains several individual elements, and the volume elements are adjacent to the local feature points to be extracted.
[0030] It is worth pointing out that when calculating the angle information between the local feature points to be extracted and the points of each voxel in the preset point cloud sphere, and calculating the concave-convex infor...
Embodiment 2
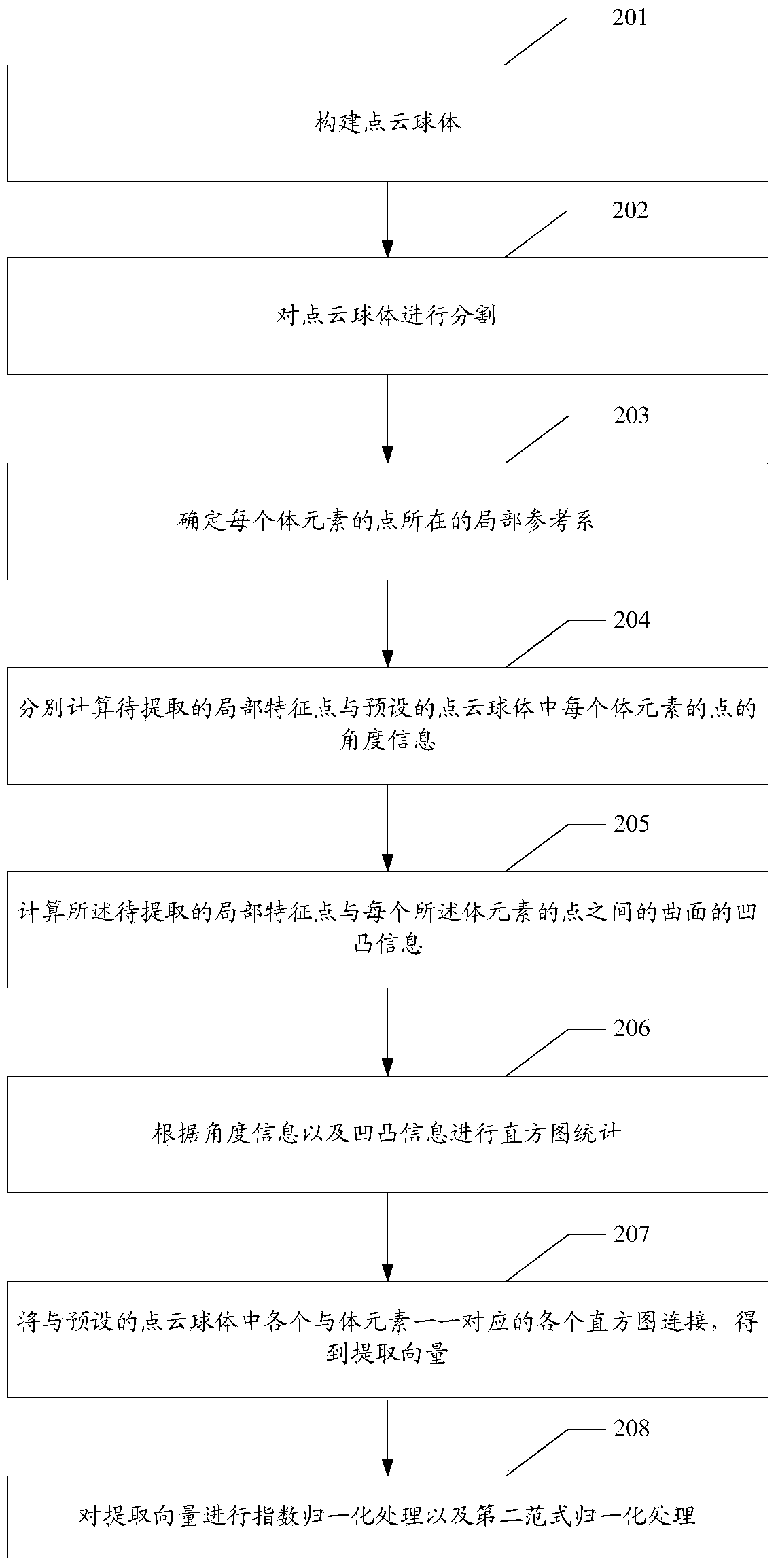
[0037] The process of this embodiment is basically the same as that of Embodiment 1. The difference is that in this embodiment, before calculating the angle information and concave-convex information, a cloud sphere is first constructed for the local feature points, and the cloud sphere is divided into several adjacent to the local feature points. body elements. Please refer to figure 2 , figure 2 It is a flowchart of a method for extracting local features of a 3D point cloud according to an embodiment of the present invention. Such as figure 2 As shown, this embodiment may include the following steps:
[0038] 201. Construct a point cloud sphere.
[0039] Construct a point cloud sphere with the local feature point to be extracted as the center and the preset length as the radius.
[0040] 202. Segment the point cloud sphere.
[0041] Segment the point cloud sphere along the direction angle, elevation angle and radius of the point cloud sphere to obtain several voxels...
Embodiment 3
[0098] Please refer to Figure 12 , Figure 12 It is a schematic diagram of the device structure of the embodiment of the present invention. Such as Figure 12 As shown, a local feature extraction device of a three-dimensional point cloud may include:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More