

Universal manipulator
A manipulator and universal technology, applied in manipulators, program-controlled manipulators, textiles and papermaking, etc., can solve the problems of inaccurate installation, leakage of pulp, deformation and damage of components, etc., and achieve the effect of realizing angle and height and wide application environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
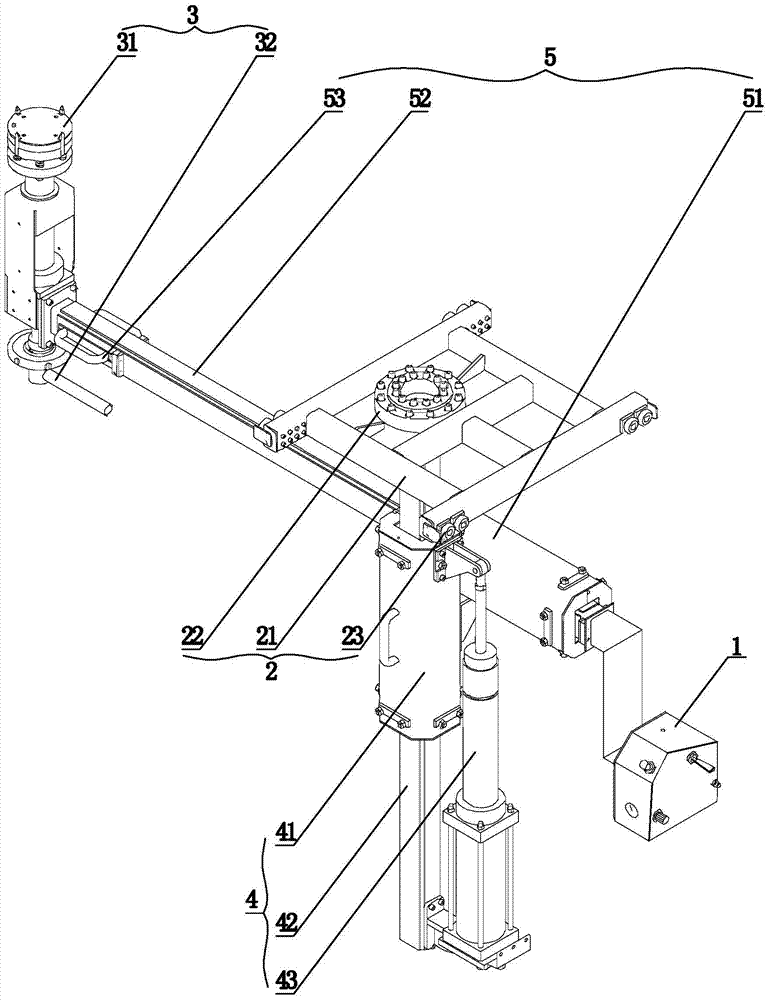
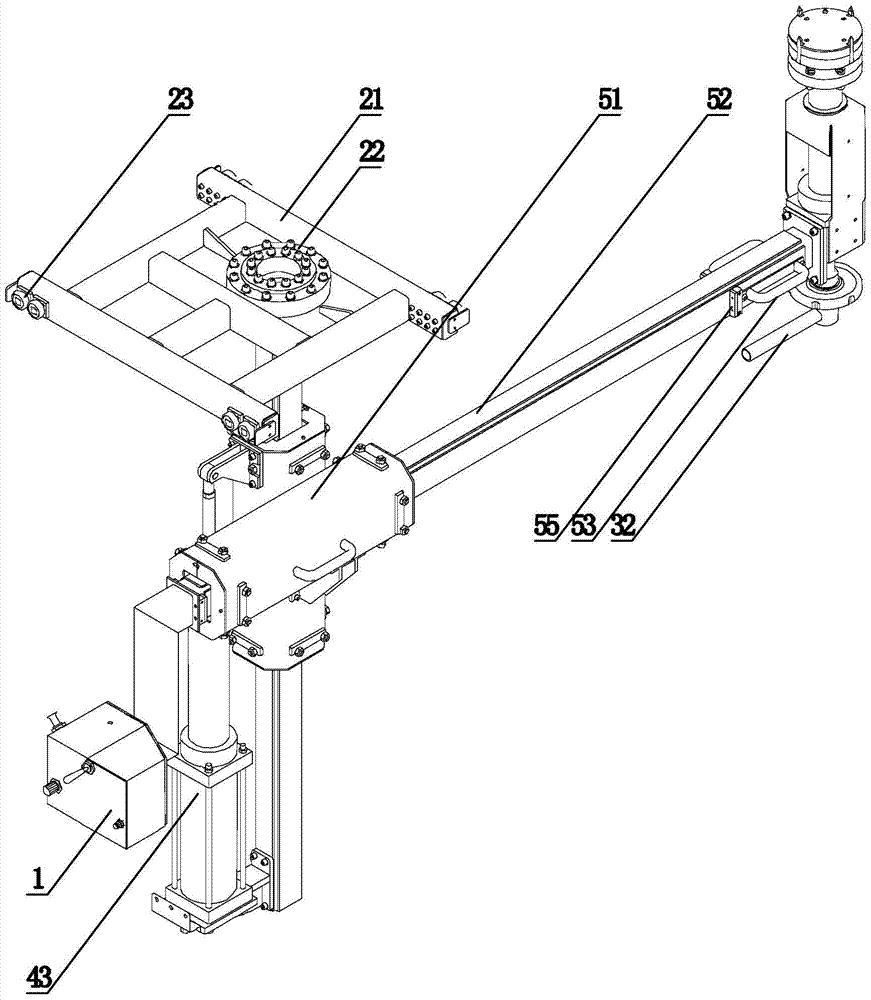
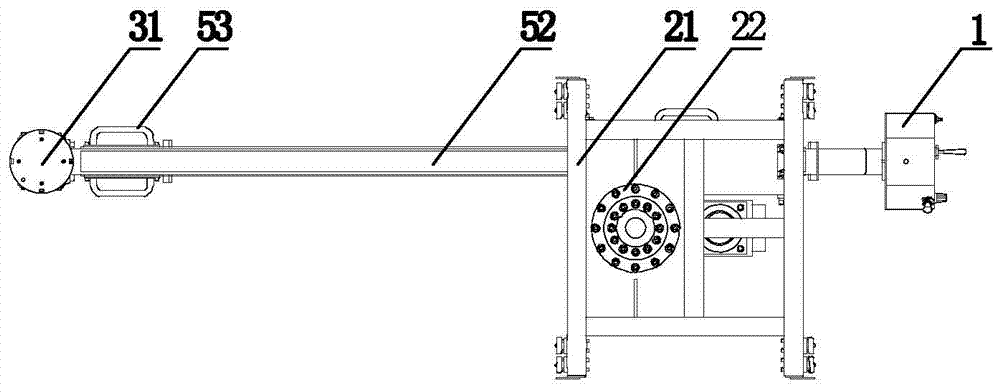
[0028] The present embodiment universal manipulator, combines figure 1 , figure 2 , image 3 and Figure 4 , consisting of a control mechanism 1, a steering mechanism 2, a guiding mechanism and a grabbing mechanism 3, the guiding mechanism includes a horizontal guiding 5 and a vertical guiding 4, the steering mechanism 2 is connected with the horizontal guiding 5, and the steering mechanism 2 is located Above 4, the grasping mechanism 3 is connected with the horizontal guide 5; both the vertical guide 4 and the horizontal guide 5 are regulated by the control mechanism 1, the vertical guide 4 moves up and down, and the horizontal guide 5 moves back and forth or rotates to realize the grasping mechanism 3 changes, the steering mechanism 2 controls the orientation of the horizontal guide 5 and the vertical guide 4, and the steering mechanism 2 and the control mechanism 1 realize the change of the position and direction of the grasping mechanism 3 through the horizontal guide 5...
Embodiment 2
[0033] Universal manipulator, combined with figure 1 , figure 2 , image 3 and Figure 4 , consisting of a control mechanism 1, a steering mechanism 2, a guiding mechanism and a grabbing mechanism 3, the guiding mechanism includes a horizontal guiding 5 and a vertical guiding 4, the steering mechanism 2 is connected with the horizontal guiding 5, and the steering mechanism 2 is located Above 4, the grasping mechanism 3 is connected with the horizontal guide 5; both the vertical guide 4 and the horizontal guide 5 are regulated by the control mechanism 1, the vertical guide 4 moves up and down, and the horizontal guide 5 moves back and forth or rotates to realize the grasping mechanism 3 changes, the steering mechanism 2 controls the orientation of the horizontal guide 5 and the vertical guide 4, and the steering mechanism 2 and the control mechanism 1 realize the change of the position and direction of the grasping mechanism 3 through the horizontal guide 5 and the vertical ...
Embodiment 3
[0036] The present embodiment universal manipulator, combines figure 1 , figure 2 , image 3 and Figure 4 , consisting of a control mechanism 1, a steering mechanism 2, a guiding mechanism and a grabbing mechanism 3, the guiding mechanism includes a horizontal guiding 5 and a vertical guiding 4, the steering mechanism 2 is connected with the horizontal guiding 5, and the steering mechanism 2 is located Above 4, the grasping mechanism 3 is connected with the horizontal guide 5; both the vertical guide 4 and the horizontal guide 5 are regulated by the control mechanism 1, the vertical guide 4 moves up and down, and the horizontal guide 5 moves back and forth or rotates to realize the grasping mechanism 3 changes, the steering mechanism 2 controls the orientation of the horizontal guide 5 and the vertical guide 4, and the steering mechanism 2 and the control mechanism 1 realize the change of the position and direction of the grasping mechanism 3 through the horizontal guide 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More