

Five-freedom-degree parallel mechanism variable in structure parameter and work space
A technology of working space and structural parameters, applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as parallel mechanisms that have not yet appeared, and achieve the effects of easy kinematic inverse solution, large working space, and easy control of switching conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
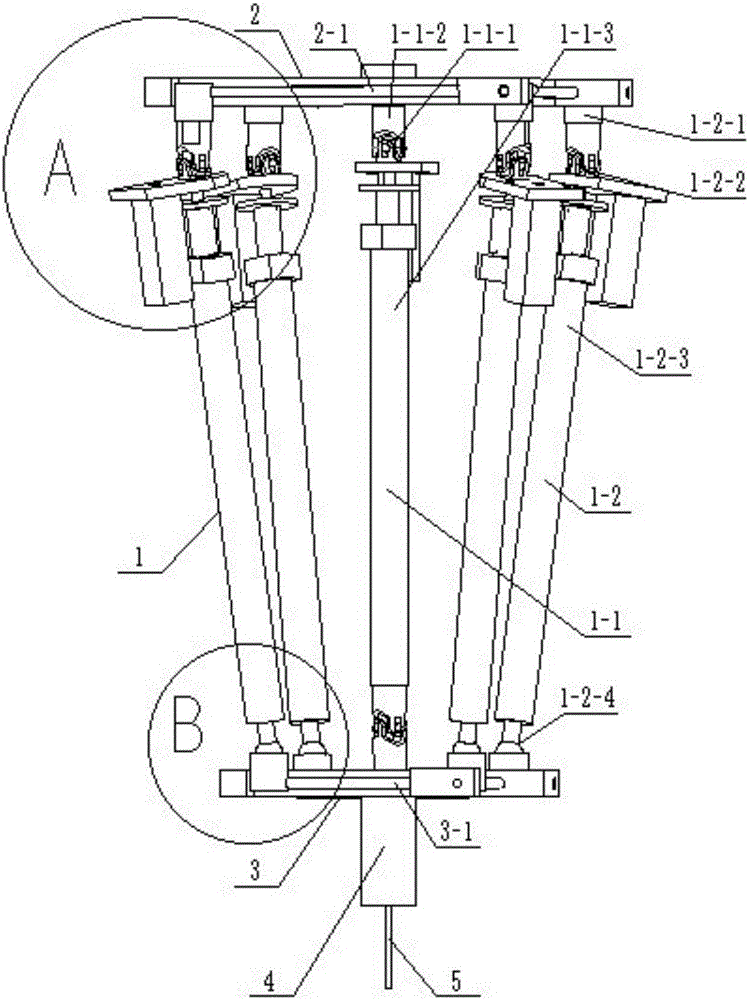
[0025] Combine below figure 1 , 2 , 3 Explain this embodiment. The present invention relates to a five-degree-of-freedom parallel mechanism, more specifically, a five-degree-of-freedom parallel mechanism with variable structural parameters and working space. This mechanism can realize two rotations, three movements and three rotations The five degrees of freedom can be switched between the two movements, and the switching conditions are easy to control; in addition to the advantages of ordinary parallel robots such as small error, large bearing capacity, and easy kinematics inverse solution, it also has adjustable structural parameters, variable motion performance, and large working space. The advantages of large size and strong pertinence to working conditions.
[0026] One end of the driving branch mechanism 1 is connected with the static platform 2, and the other end of the driving branch mechanism 1 is connected with the moving platform 3, and the position of the moving p...
specific Embodiment approach 2
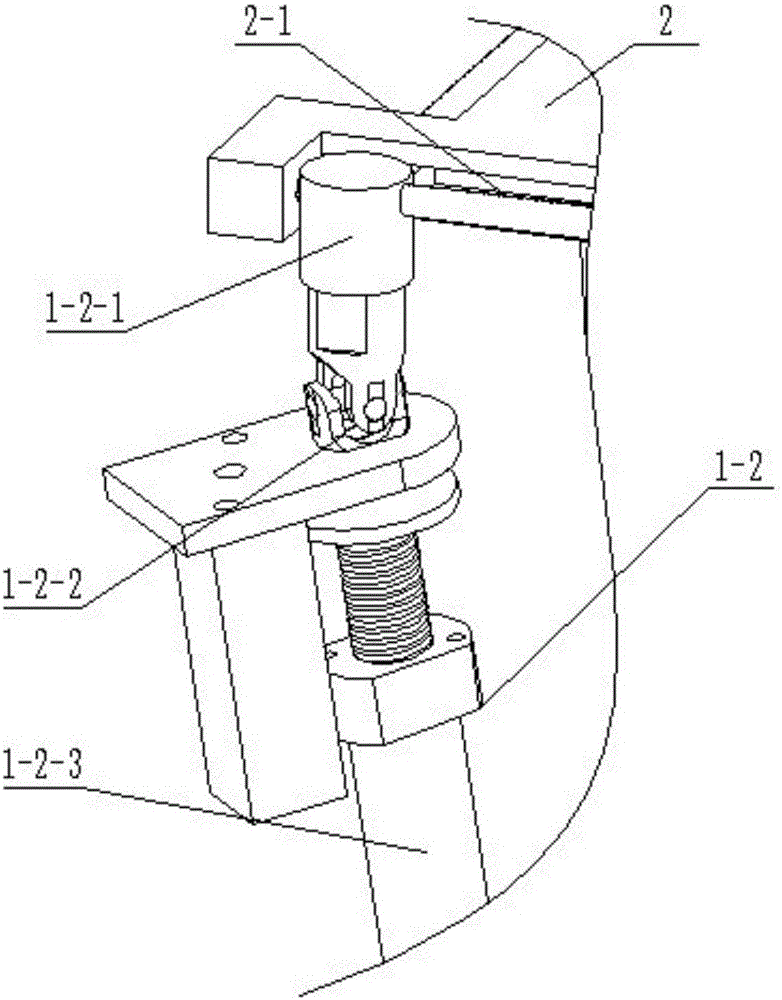
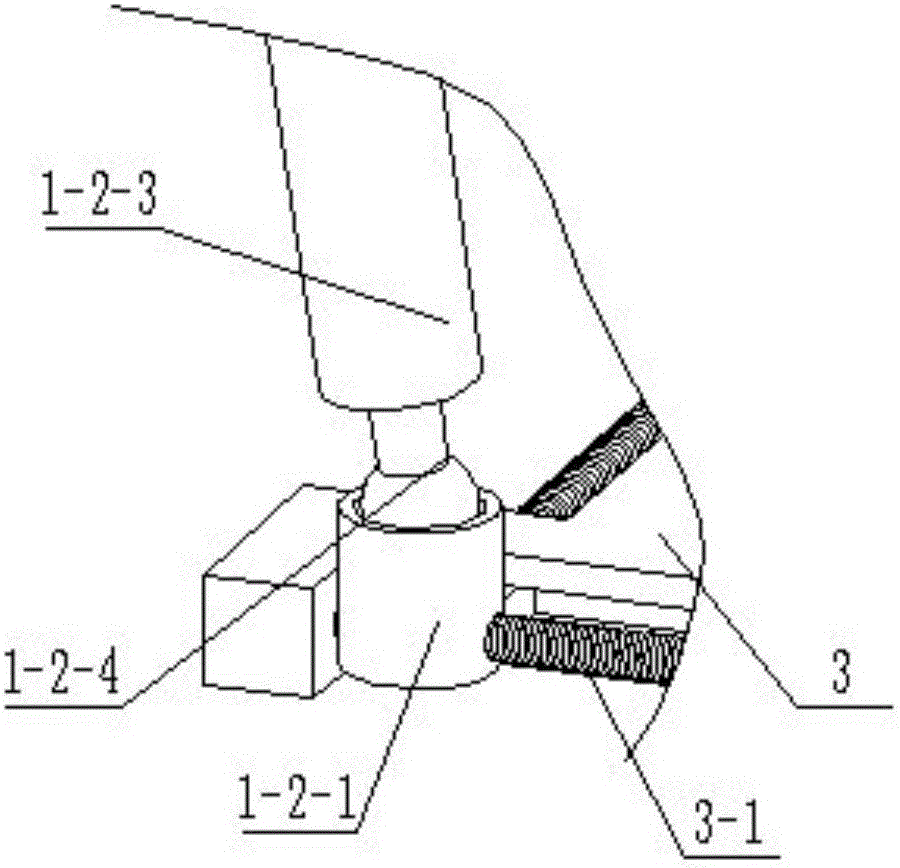
[0027] Combine below figure 1 , 2 , 3 illustrate the present embodiment, the present embodiment will further explain the first embodiment, the drive branch mechanism 1 includes the middle drive branch mechanism 1-1 and the surrounding drive branch mechanism 1-2, and one end of the middle drive branch mechanism 1-1 is installed On the static platform 2 and located at the geometric center of the static platform 2, the other end of the middle drive branch mechanism 1-1 is installed on the dynamic platform 3 and located at the geometric center of the dynamic platform 3. There are four surrounding driving branches 1-2, and one end of the surrounding driving branch 1-2 is movably installed on the static platform 2 through a hinge, and the other end of the surrounding driving branch 1-2 is movably installed through the ball pair 1-2-4 On the moving platform 3, the position of the cutter 5 can be adjusted by controlling the expansion and contraction of the intermediate drive branch m...
specific Embodiment approach 3
[0028] Combine below figure 1 , 2 , 3 illustrate this embodiment, this embodiment will further explain Embodiment 2, the intermediate drive branch 1-1 includes two universal joints I1-1-1, two fixing devices 1-1-2 and the middle The telescopic device Ⅰ1-1-3, the two ends of the middle telescopic device Ⅰ1-1-3 are respectively connected to the fixed device 1-1-2 through a universal joint 1-1-1Ⅰ, and the two fixed devices 1-1-2 They are respectively fixed on the static platform 2 and the dynamic platform 3, and the expansion and contraction of the middle telescopic device I1-1-3 makes the length of the middle driving branch mechanism 1-1 change, and it can be adjusted according to needs.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More