

UUV 2D sea route planning method based on geographical circumvention theory
A geometric circumnavigation and route planning technology, applied in two-dimensional position/course control, vehicle position/route/altitude control, non-electric variable control, etc., can solve the problem of only considering circular obstacles and obstacle detour methods In order to achieve the effect of less planning information, improve route tracking effect and high planning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in more detail below with examples in conjunction with the accompanying drawings.
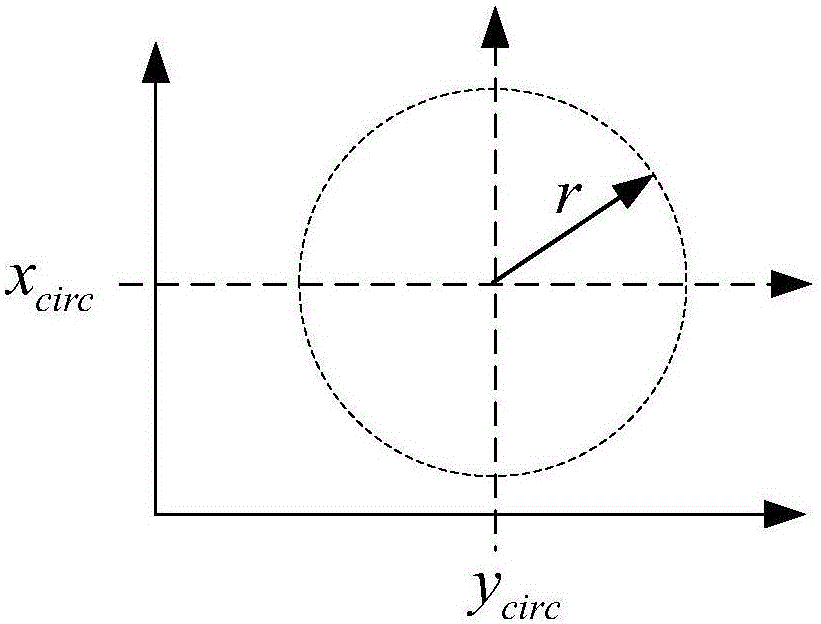
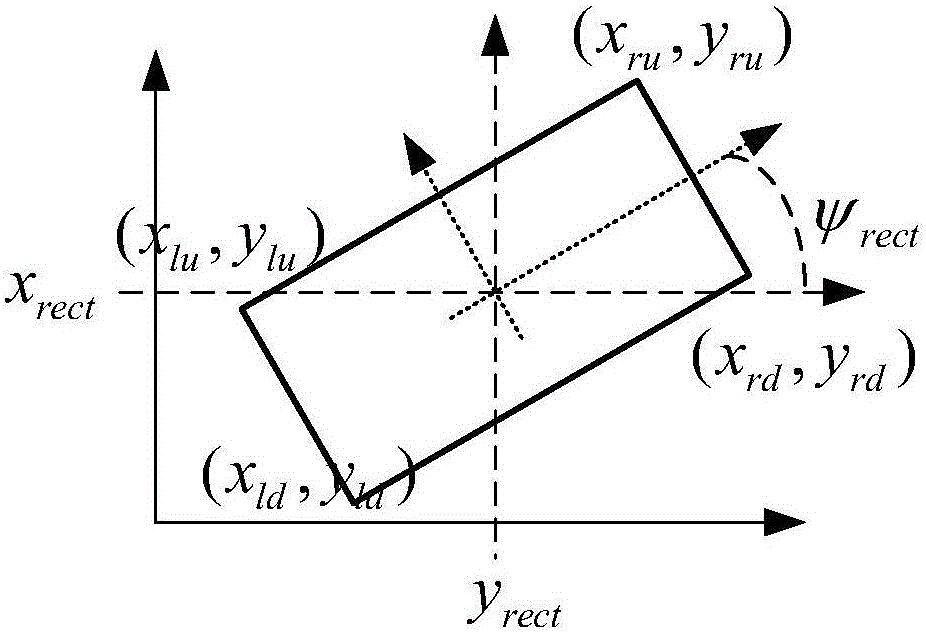
[0061] combine Figure 1a-Figure 1b An environment model for UUV 2D route planning is introduced.
[0062] The environment model of route planning in the present invention adopts a two-dimensional geometric space model. Let the starting point of the planned route be O b , the end point of the route is O e , O b and O e Respectively expressed in two-dimensional coordinates as:
[0063] o b =(x ob ,y ob );O e =(x oe ,y oe ) (1)
[0064] In addition, it is assumed that the current planning point used in each step of the route planning process is O c , expressed in two-dimensional coordinates as:
[0065] o c =(x oc ,y oc ) (2)
[0066] It is assumed that there are a certain number of obstacles in the two-dimensional geometric space, and the obstacles are represented by circles and rectangles (such as Figure 1a-Figure 1b shown).
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More