

2D route planning method for UUV to round rectangular obstacles geometrically
A technology of geometric detour and route planning, which is applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., and can solve problems such as different obstacle detour methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below with examples in conjunction with the accompanying drawings.
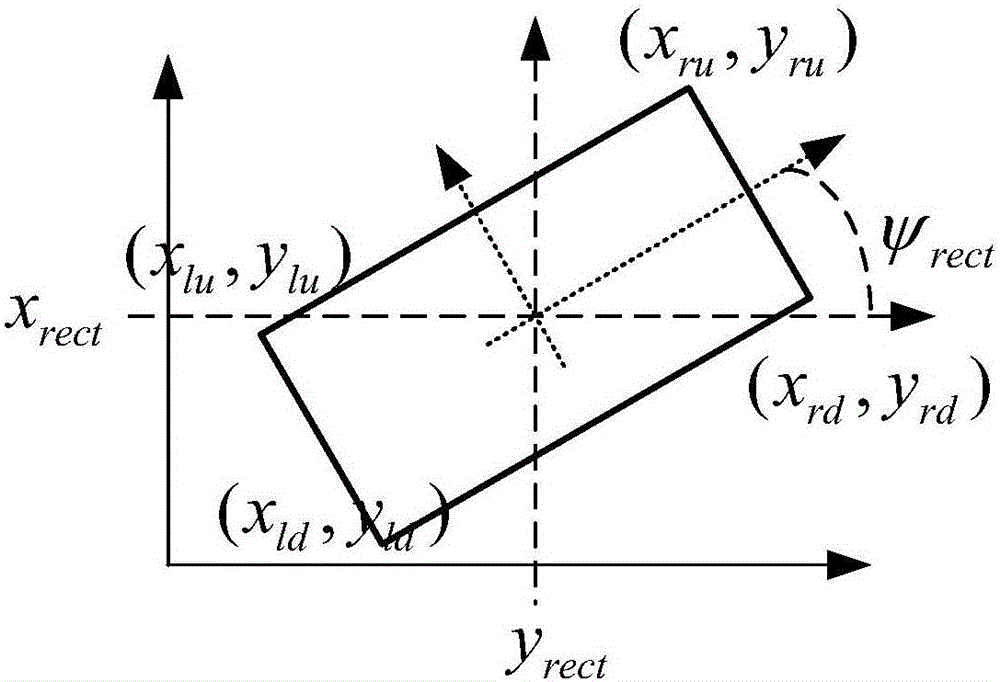
[0052] combine figure 1 The environment model of the UUV two-dimensional route planning of the present invention is introduced.
[0053] The environment model of route planning in the present invention adopts a two-dimensional geometric space model. Let the starting point of the planned route be O b , the end point of the route is O e , O b and O e Respectively expressed in two-dimensional coordinates as:
[0054] o b =(x ob ,y ob );O e =(x oe ,y oe ) (1)
[0055] In addition, it is assumed that the current planning point used in each step of the route planning process is O c , expressed in two-dimensional coordinates as:
[0056] o c =(x oc ,y oc ) (2)
[0057] Suppose there are a certain number of rectangular obstacles in the two-dimensional geometric space, such as figure 1 As shown, let the rectangular obstacle be Z rect , which is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More