

Whole-body-coordinating multifunctional four-arm robot and operating method thereof
A multi-functional and robotic technology, applied in the field of medical devices, can solve the problems of incomplete training of ordinary rehabilitation equipment, large workload of rehabilitation training, and single training mode, and achieve the effects of high safety, reducing load and maintaining body balance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
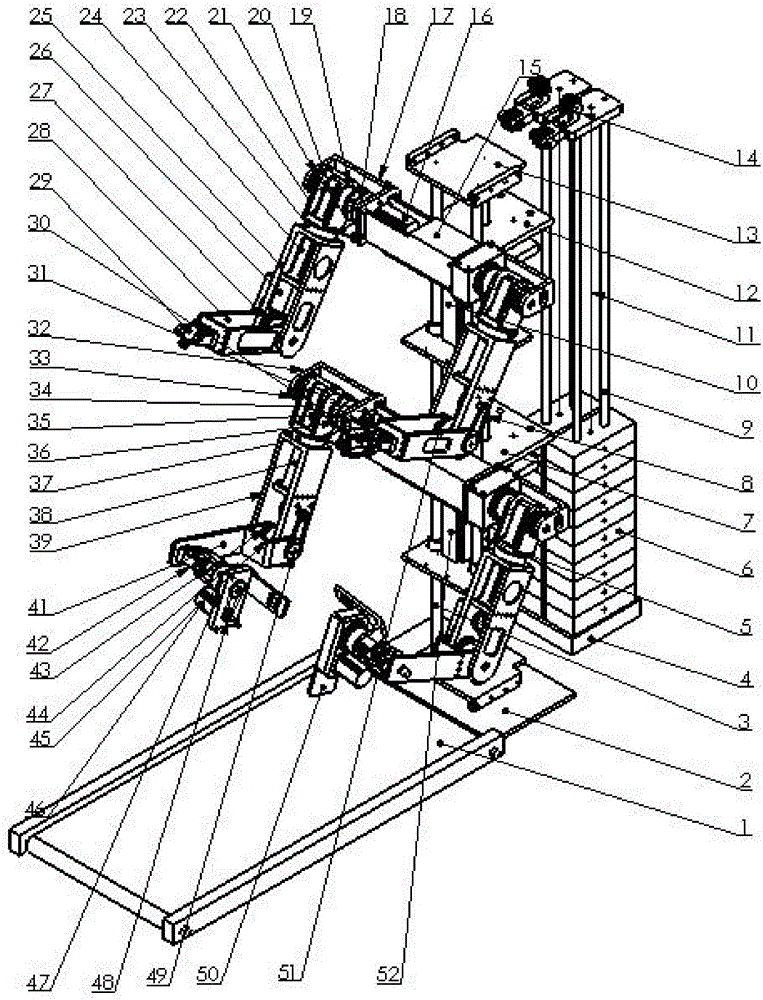
[0022] refer to figure 1 , a whole-body coordinated multifunctional four-armed robot according to an embodiment of the present invention includes a crawler-type walking machine 1, a base 2, a lifting screw mechanism, a supporting arm part and a counterweight mechanism.
[0023] Lifting lead screw mechanism comprises screw guide rod 3, leading screw 5, upper body supports lifting platform 12, upper lifting platform motor 10, lower body supports lifting platform 7, lower lifting platform motor 52 and leading screw top plate 13; Support manipulator and lower body support manipulator, upper body support manipulator includes: upper limb arm connecting pipe 15, upper limb shoulder joint motor 16, upper limb shoulder support plate 17, upper limb internal gear set 18, upper limb shoulder joint harmonic reducer 19, upper limb rotary joint moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More