

Soft-bodied hand rehabilitation gloves through combination of diverse rehabilitation training modes
A rehabilitation training and software technology, applied in the field of rehabilitation medical robots, can solve the problems of a single rehabilitation training method and the inability to replace TPU materials, and achieve the effect of improving the effect of rehabilitation training, satisfying diversification and expanding the scope of use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
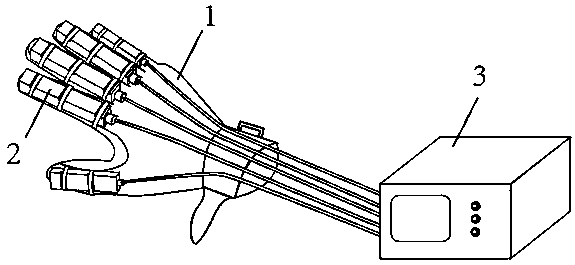
[0022] like Figure 1-Figure 4 As shown, a soft hand rehabilitation glove combined with various rehabilitation training methods includes a training glove 1, a soft exoskeleton finger 2 and a pneumatic control system 3, and it is characterized in that: the soft exoskeleton finger 2 is fixed in the training On the back of the five fingers of the glove 1, the force of the soft exoskeleton finger 2 is transmitted to the glove wearer; the soft exoskeleton finger 2 is connected with the pneumatic control system 3, and under the inflation control of the pneumatic control system 3, it can realize Bending in two directions applies force in two directions to the user's finger.
Embodiment 2
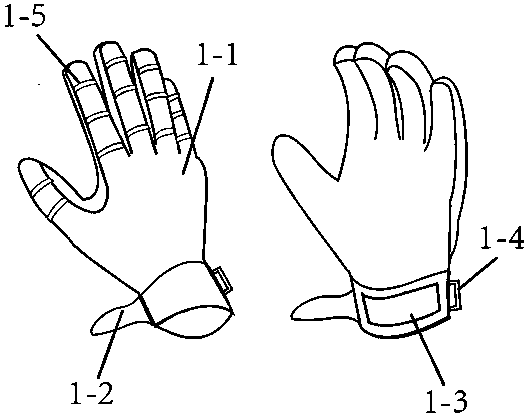
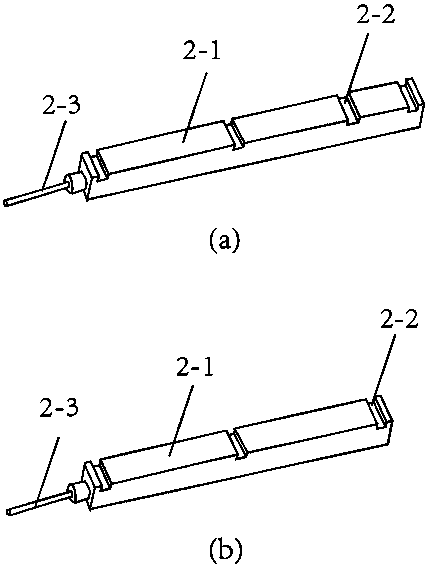
[0024] The training glove 1 includes a glove main body 1-1, a male velcro 1-2, a female velcro 1-3, a wrist fixing buckle 1-4 and a finger fixing strap 1-5, and the glove main body 1-1 is composed of Made of soft material, the male Velcro 1-2 and the wrist buckle 1-4 are fixed on both sides of the wrist of the glove main body 1-1 by sewing, and the male Velcro 1-2 is passed through the wrist buckle 1-4 is bonded with the female Velcro 1-3, so that the glove is fixed on the wrist of the glove wearer; the finger fixing strap 1-5 is fixed on the back of the hand of the glove main body 1-1, and on the back of each finger by sewing. Between the joints, there are 3 finger fixing straps 1-5 at the thumb, and 4 finger fixing straps 1-5 each for the index finger, middle finger, ring finger, and little finger. The soft exoskeleton finger 2 includes a soft finger body 2-1 and an air duct 2-3. The soft finger body 2-1 receives the air pressure output by the pneumatic control system 3 thr...
Embodiment 3
[0026] like figure 1 As shown, a soft hand rehabilitation glove combined with multiple rehabilitation training methods, including a training glove 1, a soft exoskeleton 2 and a pneumatic control system 3. The soft exoskeleton 2 is fixed on the five fingers of the glove 1, and the air duct 2-3 of the soft exoskeleton 2 is connected with the pneumatic system 3.
[0027] like figure 2 As shown, the training glove includes a glove body 1-1, a male velcro 1-2, a female velcro 1-3, a wrist buckle 1-4 and a finger fixing strap 1-5. The male Velcro 1-2 is fixed on the wrist of the glove body 1-1 by the thumb, the wrist buckle 1-4 is fixed on the glove body 1-1 by the wrist by the little finger by sewing, and the female Velcro 1-3 It is fixed on the glove main body 1-1 wrist near the palm of the hand. By passing the male Velcro 1-2 through the wrist fixing buckle 1-4 and bonding the female Velcro 1-3, the glove is fixed on the glove wearer's wrist, so that the wearer can wear the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More