

Upper limb rehabilitation training exoskeleton mechanism with human-machine motion compatibility and passive gravity balance characteristics
A technology of gravity balance and balance mechanism, applied in passive exercise equipment, physical therapy, etc., can solve the problems of poor patient experience, secondary injury, etc., and achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
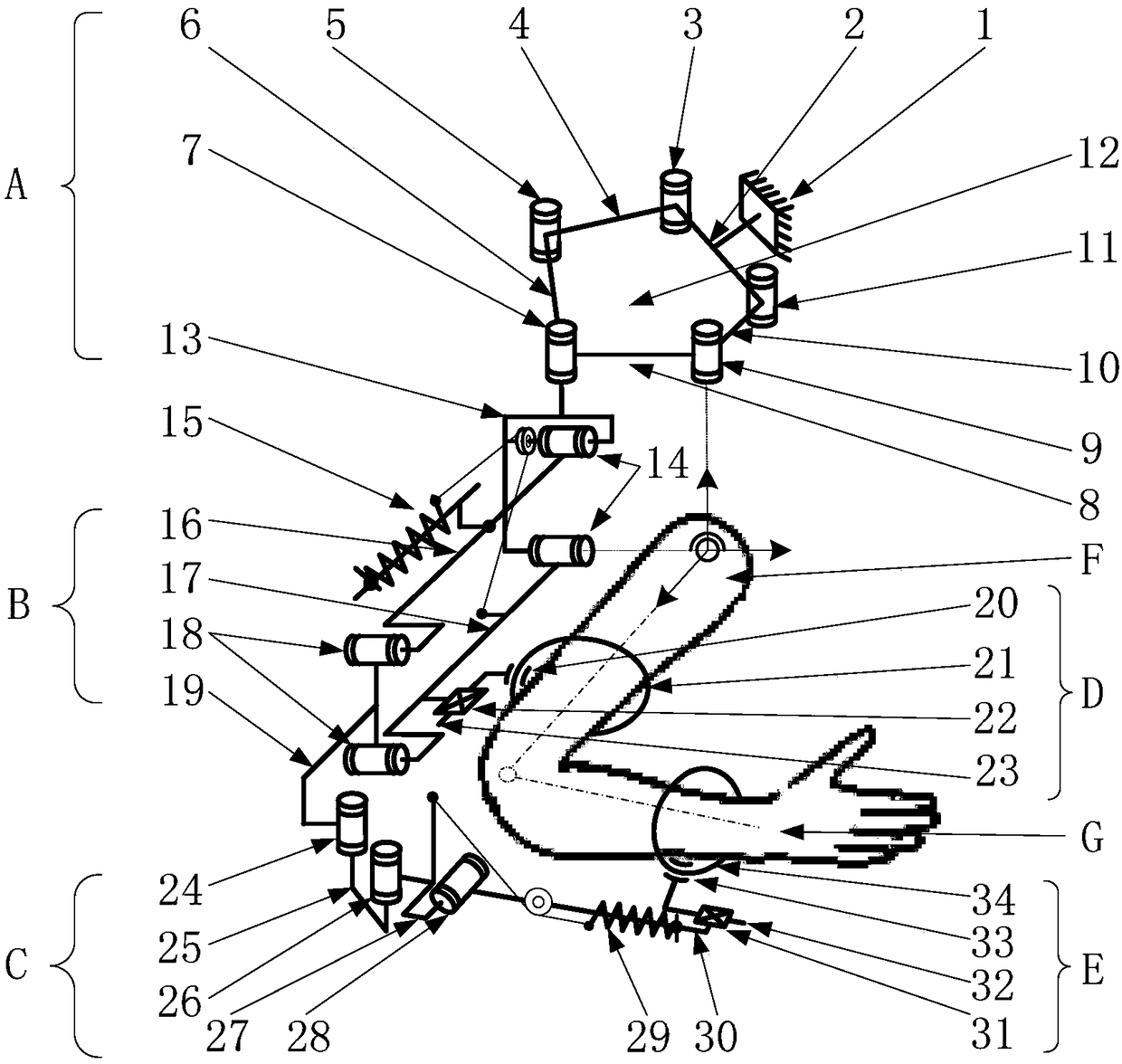
[0026] Further illustrate the present invention below in conjunction with accompanying drawing.
[0027] Such as figure 1 As shown, the upper limb rehabilitation exoskeleton mechanism includes shoulder joint equivalent mechanism (A), upper arm equivalent mechanism (B), elbow joint equivalent mechanism (C), forearm component (30), upper arm connection mechanism (D), forearm Connection mechanism (E), support (1) and two gravity balance mechanisms (15) (29), among which the equivalent mechanism of shoulder joint (A), the equivalent mechanism of upper arm (B), and the equivalent mechanism of elbow joint (C) Together with the forearm component (30) and two balance mechanisms (15) (29) constitute an upper extremity exoskeleton mechanism with gravity balance characteristics, the upper arm connection mechanism (D) and the forearm connection mechanism (E) constitute a man-machine connection mechanism, the exoskeleton The mechanism is fixedly connected to the support (1) through the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More