

Real-time glonass phase deviation estimation method based on particle swarm optimization algorithm
A technology of particle swarm optimization and phase deviation, which is applied in the field of satellite positioning system and positioning measurement, and can solve problems such as unavailability of correction parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] An embodiment of the present invention will be further described below in conjunction with the accompanying drawings.
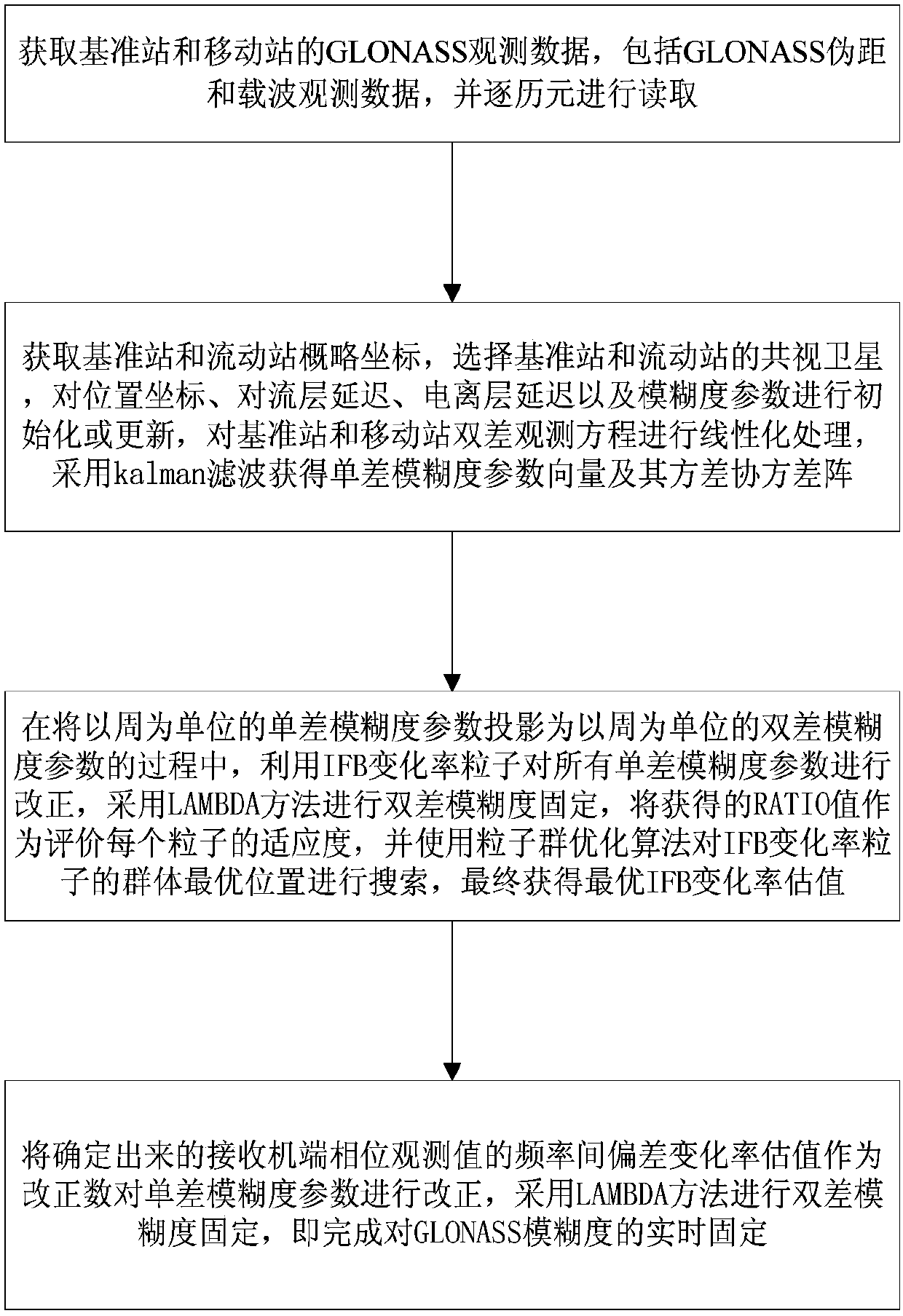
[0088] In the embodiment of the present invention, the real-time GLONASS phase deviation estimation method based on the particle swarm optimization algorithm, such as figure 1 shown, including the following steps:
[0089] Step 1: Obtain the GLONASS observation data of the reference station and the mobile station, including GLONASS pseudorange and carrier observation data, and read them epoch by epoch;
[0090] In the embodiment of the present invention, an 8.6km long baseline data is selected, and the baseline uses two different types of receivers for data collection. The two types of receivers are TRIMBLE NETR9 and JPS EGGDT respectively, and the corresponding antennas are TRM57971.00 and AOAD / M_T; baseline data sampling interval is 30s, observation time is 11h20min;
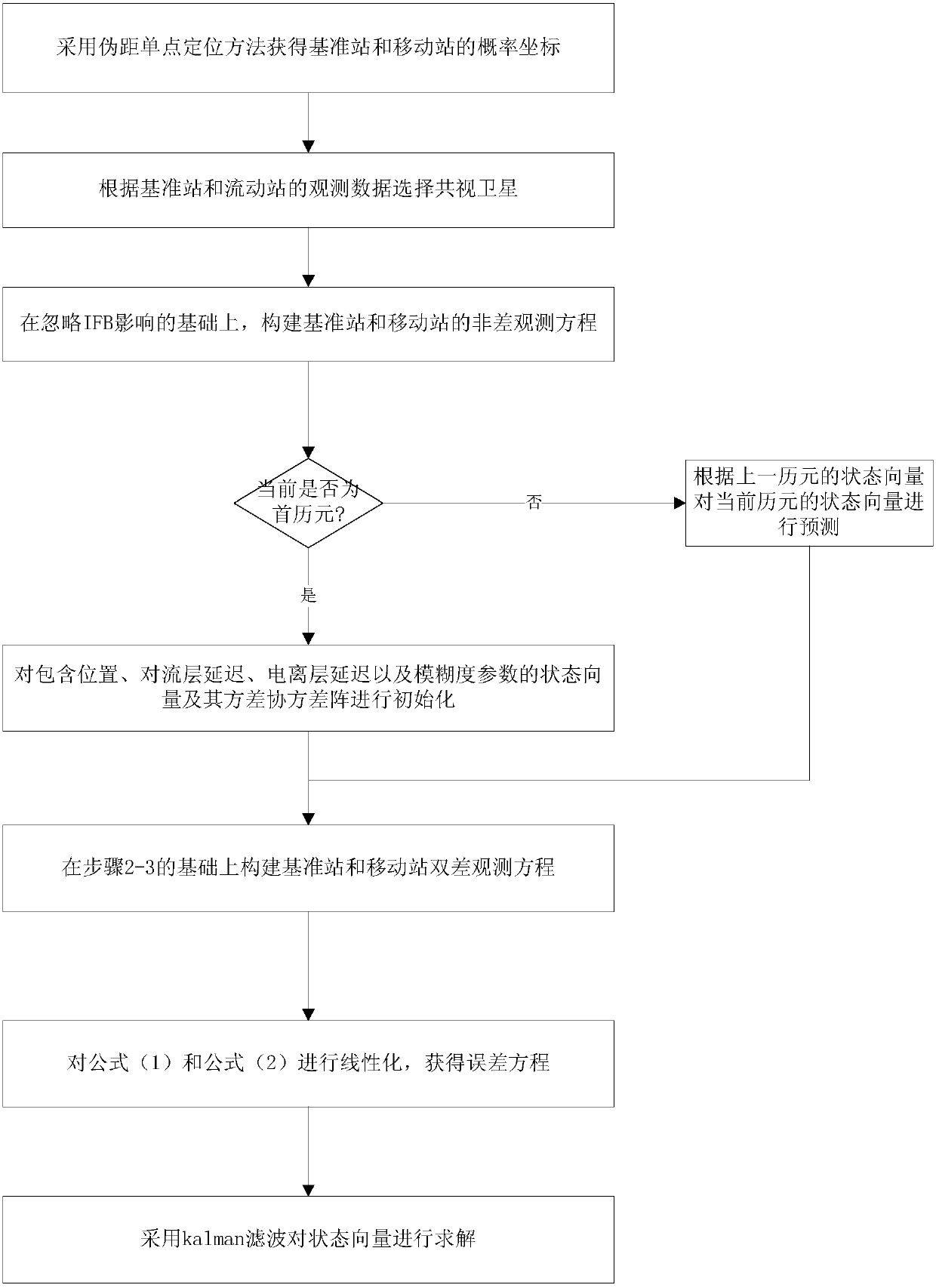
[0091] Step 2. Obtain the approximate coordinates of the base station and the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More