

A full 3D occupied voxel terrain modeling method based on lidar
A technology of lidar and modeling method, which is applied in the application field and can solve the problems of terrain modeling uncertainty space description of three-dimensional terrain environment and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
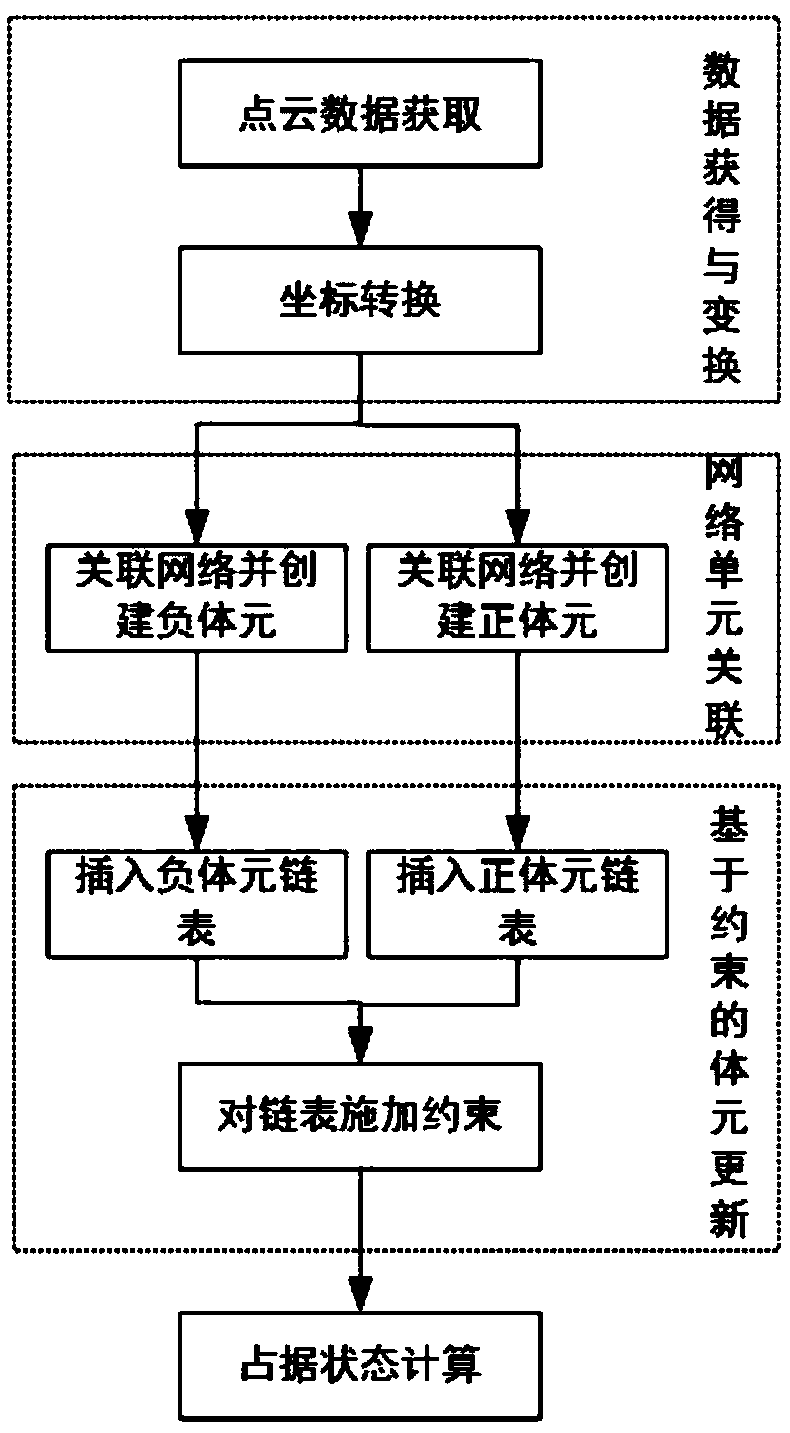
[0080] Such as figure 1 As shown, a lidar-based full 3D occupancy voxel terrain modeling method in the embodiment of the present invention includes the following steps:
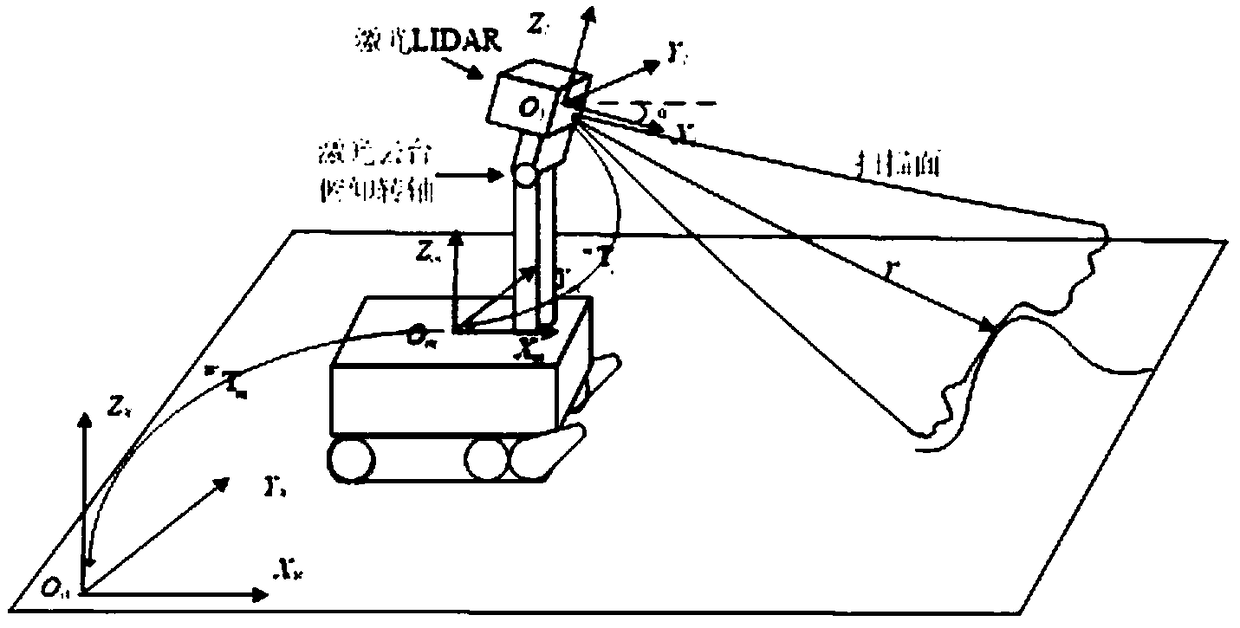
[0081] Step 10) Data acquisition and coordinate transformation: firstly, the laser radar equipment installed on the mobile robot platform is used to obtain the depth information of the surrounding environment; secondly, the coordinate transformation is used to convert the laser measurement data into point cloud data in the global coordinate system, and the The multi-source uncertainty in the measurement process is fused and processed by means of interval set members;
[0082] Step 20) Establish voxels: For the gap area from the start point to the end point of the ray, calculate the entry point and exit point of the grid it passes through according to the ray tracing algorithm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More