

An intelligent warehouse roadway robot manipulator
A technology of intelligent warehousing and manipulators, which is applied to conveyor objects, transportation and packaging, storage devices, etc., and can solve the problems of insufficient in-position accuracy, slow response, and unstable grasping of goods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
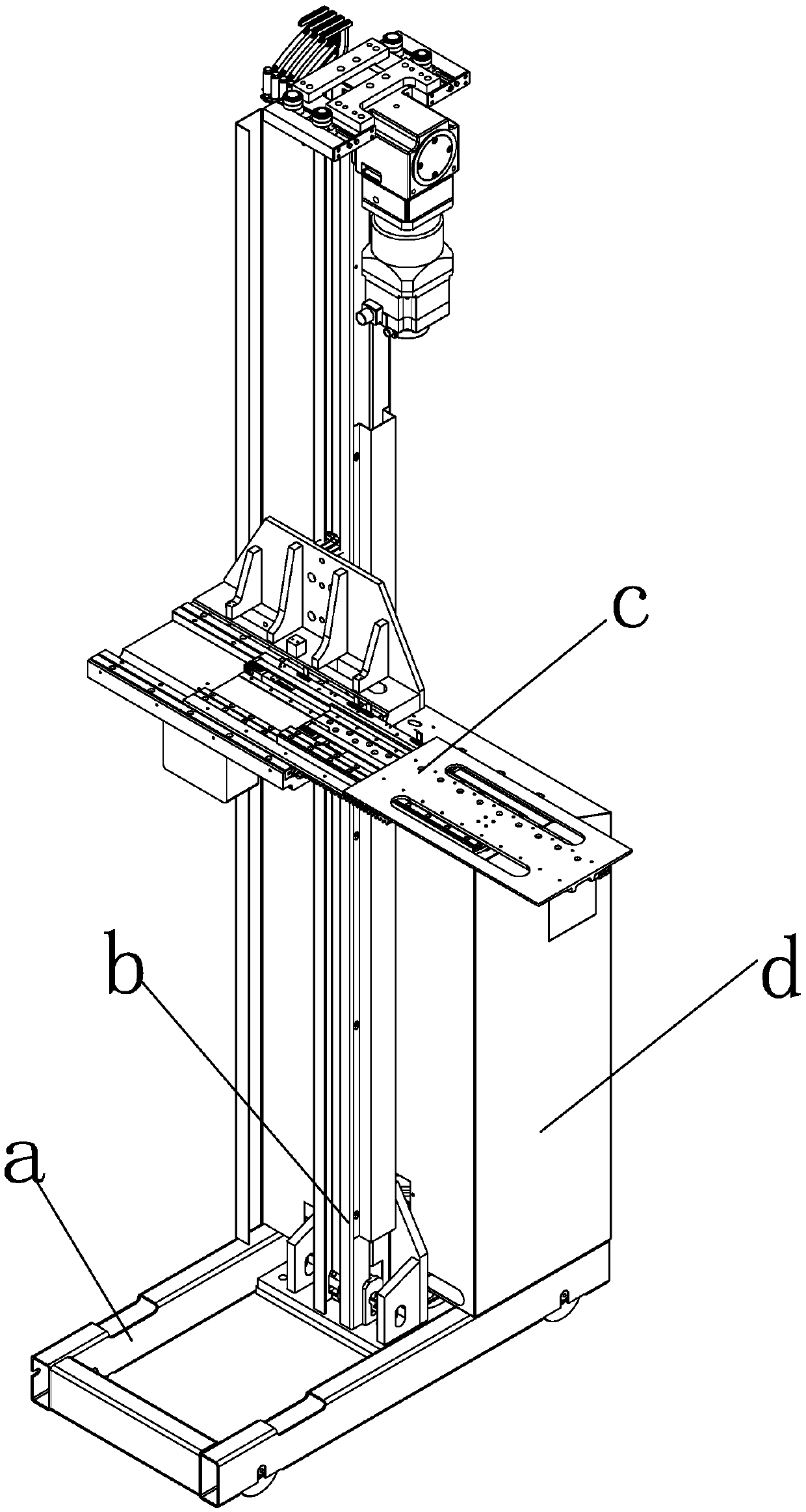
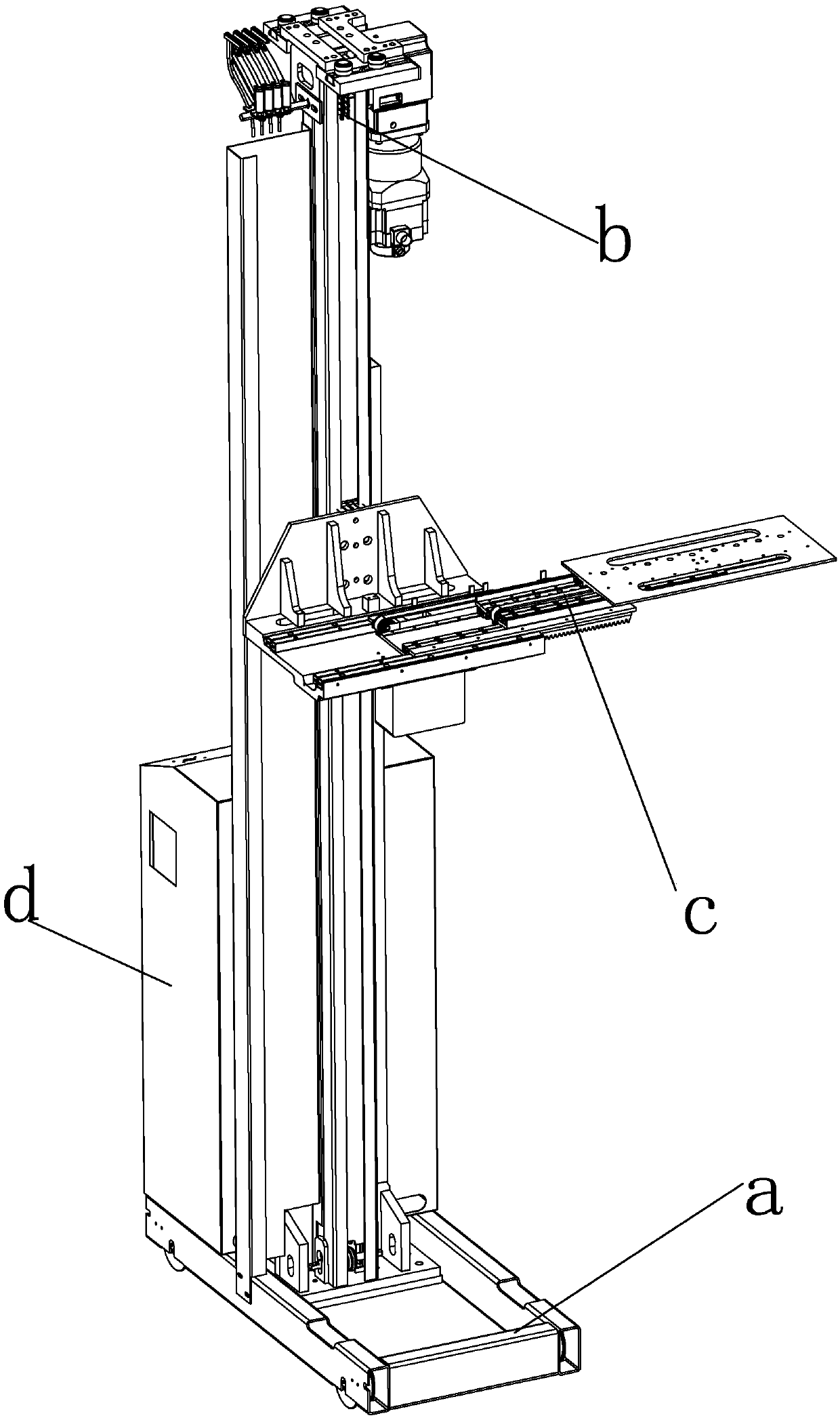
[0024] see Figures 1 to 2 , the intelligent storage roadway robot manipulator provided in this embodiment is set on the intelligent storage roadway robot (specifically, installed on the vertical lifting mechanism of the intelligent storage roadway robot) through the support mounting plate. Wherein, the intelligent warehouse roadway robot includes a horizontal moving mechanism a, a vertical lifting mechanism b, a manipulator c and an industrial computer control system power distribution cabinet d.
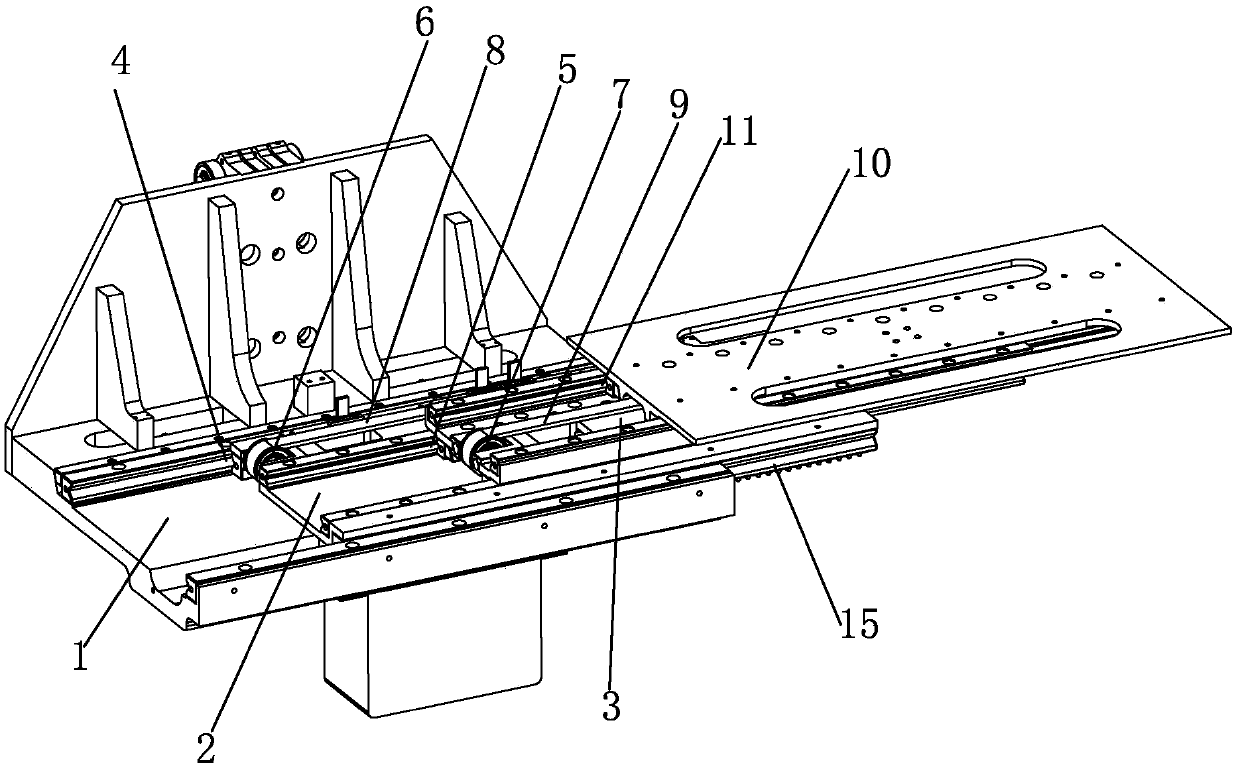
[0025] see Figures 3 to 7 , an intelligent storage roadway robot manipulator, including a driving device, a plate base 1, a first transition plate 2, a second transition plate 3, a first transition plate guide rail 4, a second transition plate guide rail 5, a first transition plate synchronous wheel set 6, The second transition plate synchronous wheel set 7, the first transition plate synchronous belt 8, the second transition plate synchronous belt 9, the fork plate 10, the fork ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More