

A Method for Measuring Errors of Key Points of Robot Motion Trajectories
A technology of robot motion and motion error, which is applied to measuring devices, instruments, and optical devices, etc., can solve problems such as narrow application fields, and achieve the effects of convenient control, easy implementation, and easy real-time acquisition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
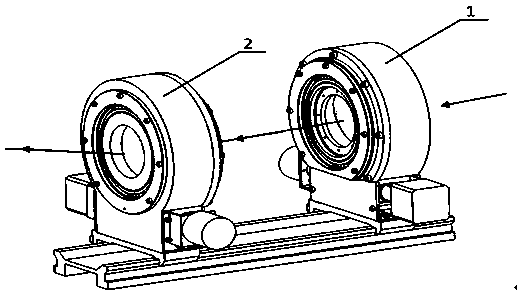
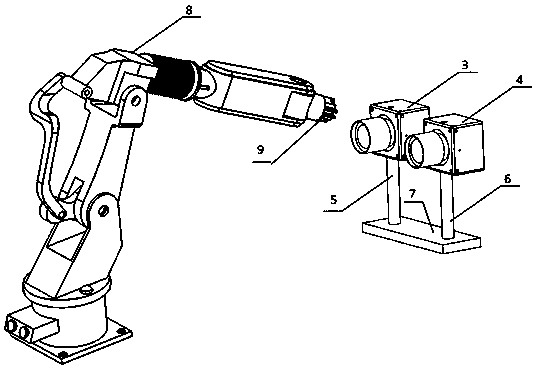
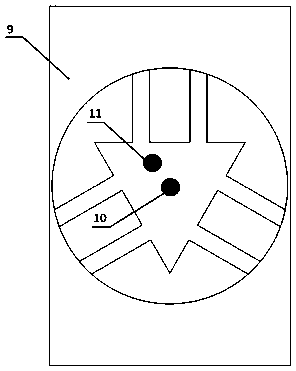
[0041] The invention provides a method for measuring the key point error of the robot motion trajectory, which can realize the measurement of the key point motion error during the robot motion process: during the motion process of the robot, the robot is controlled to stop moving at a certain key point, and the visual imaging system collects the key point error. At the same time, the dual prism tracking device generated by the key point generates the coordinates of the theoretical space point. By calculating the distance between the two points, the robot motion error at the key point can be obtained. The object of the present invention is achieved through the following parts: a dual prism tracking device including key point generation and a binocular vision measurement system for key point image acquisition. According to the position coordinates of key points in the trajectory of the robot, the rotating double prism produces a high-precision beam scanning to the position of thi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More