

A trajectory detection method for a wire-driven minimally invasive surgical robot
A technology of minimally invasive surgery and detection methods, applied in the direction of instruments, measuring devices, measuring angles, etc., to achieve the effect of improving surgical operation ability and improving surgical effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described in detail below in conjunction with the accompanying drawings.
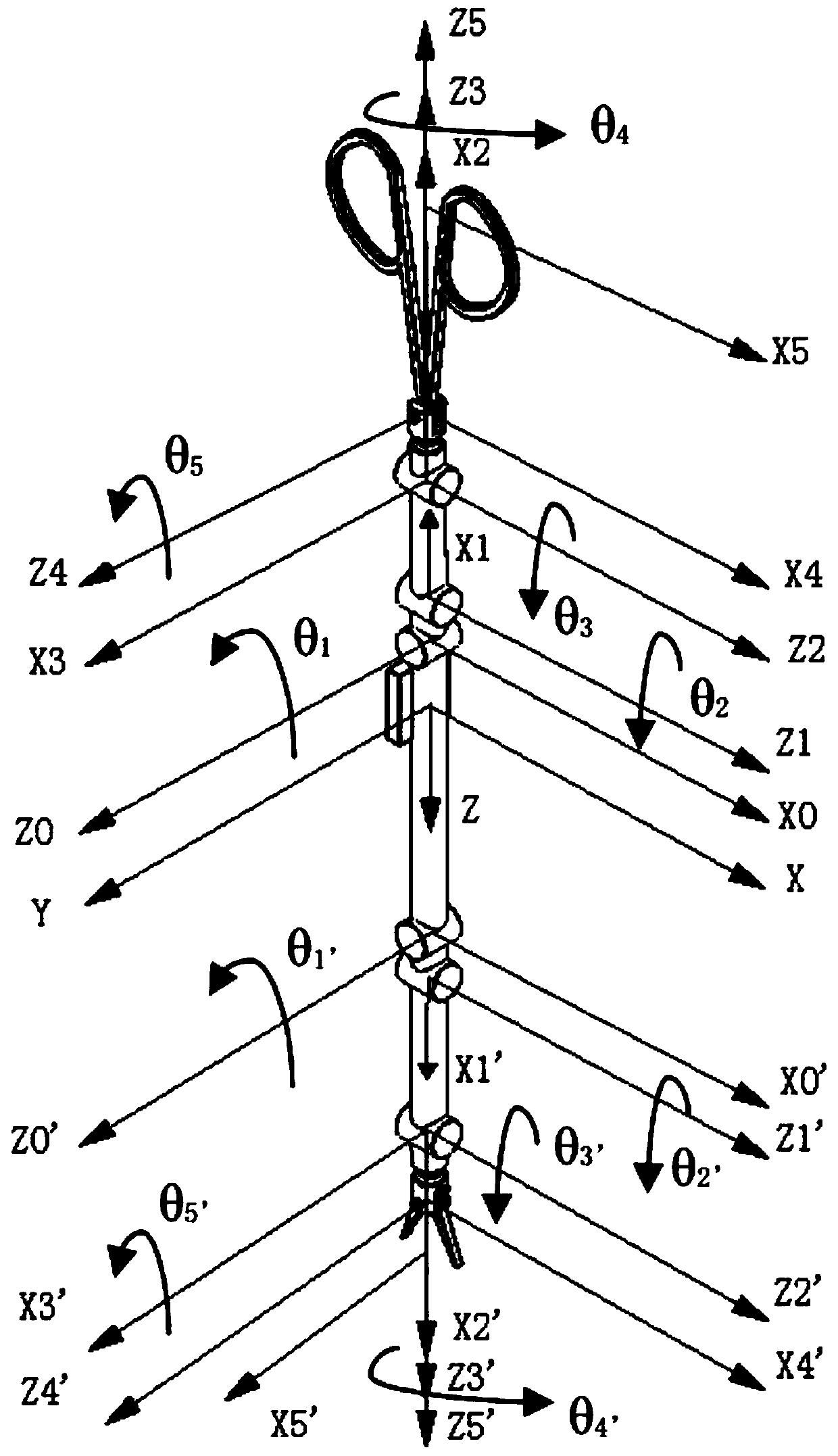
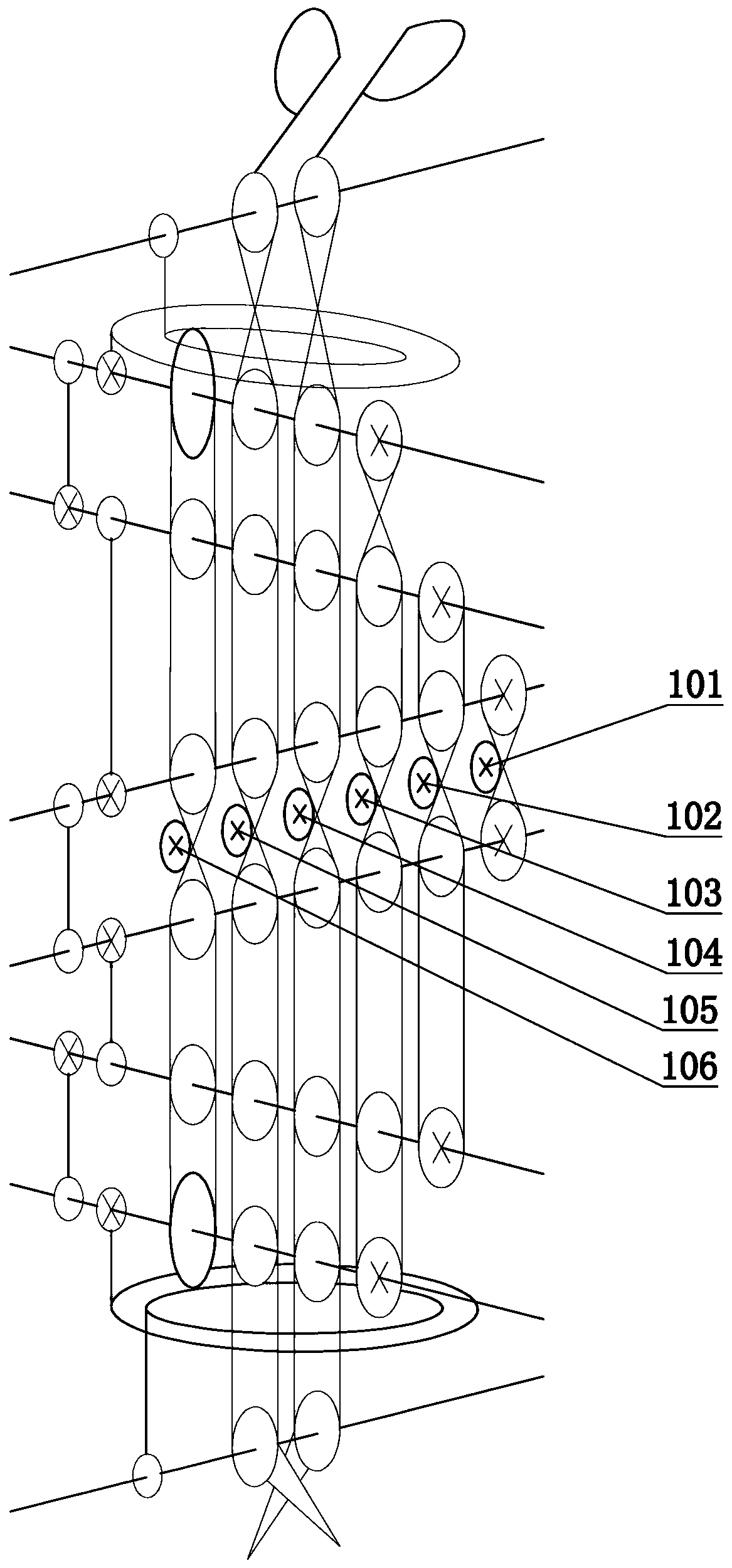
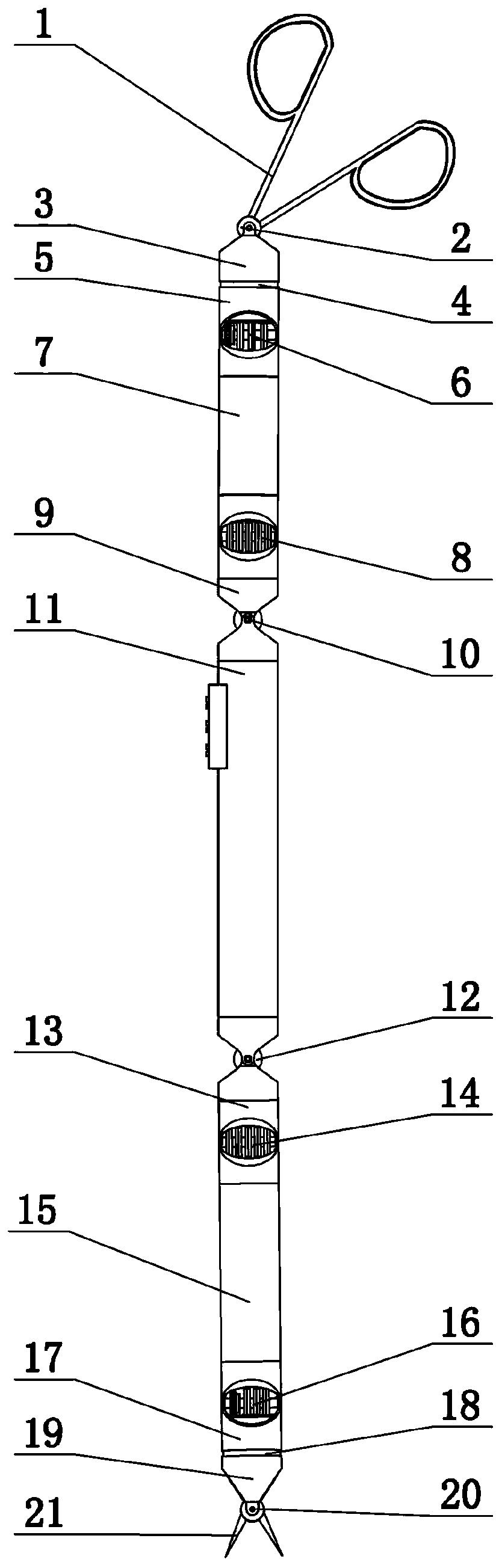
[0058] Such as Figure 1-6 As shown, the rods that make up the minimally invasive surgical robot are hollow rods, and the connection between the handle, surgical scissors and each joint is realized through steel wires inside, so as to realize the motion control and force transmission between the handle and surgical scissors. specific motion mapping between them. Such as figure 2 As shown, the ellipse with a cross in the center represents the driving wheel, and the ellipse without a cross in the center represents the supporting wheel. The driving wheel can drive the shaft to rotate, and the supporting wheel can freely transfer around the shaft; the driving wheel includes the first quick change device driving wheel 101, The second quick changer drive wheel 102 , the third quick changer drive wheel 103 , the fourth quick changer drive wheel 104 , the fifth qu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More