

A minimally invasive surgical tool for a novel minimally invasive surgical robot system
A robotic system, minimally invasive surgery technology, applied in surgical robotics, surgery, medical science, etc., to achieve low-cost effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings.
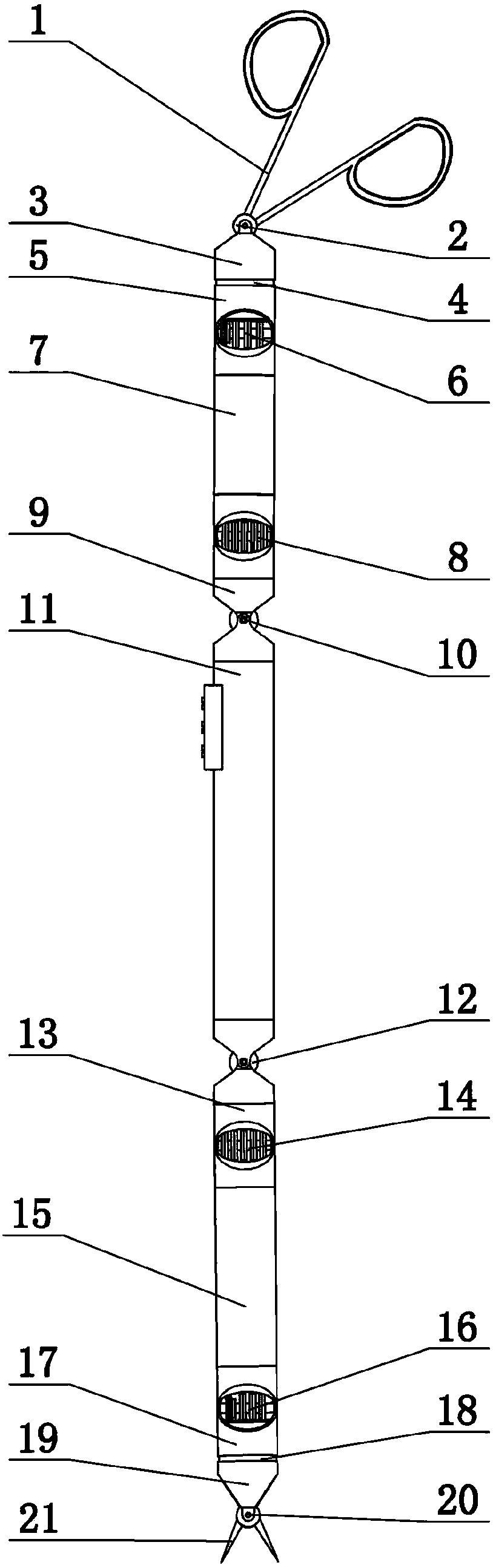
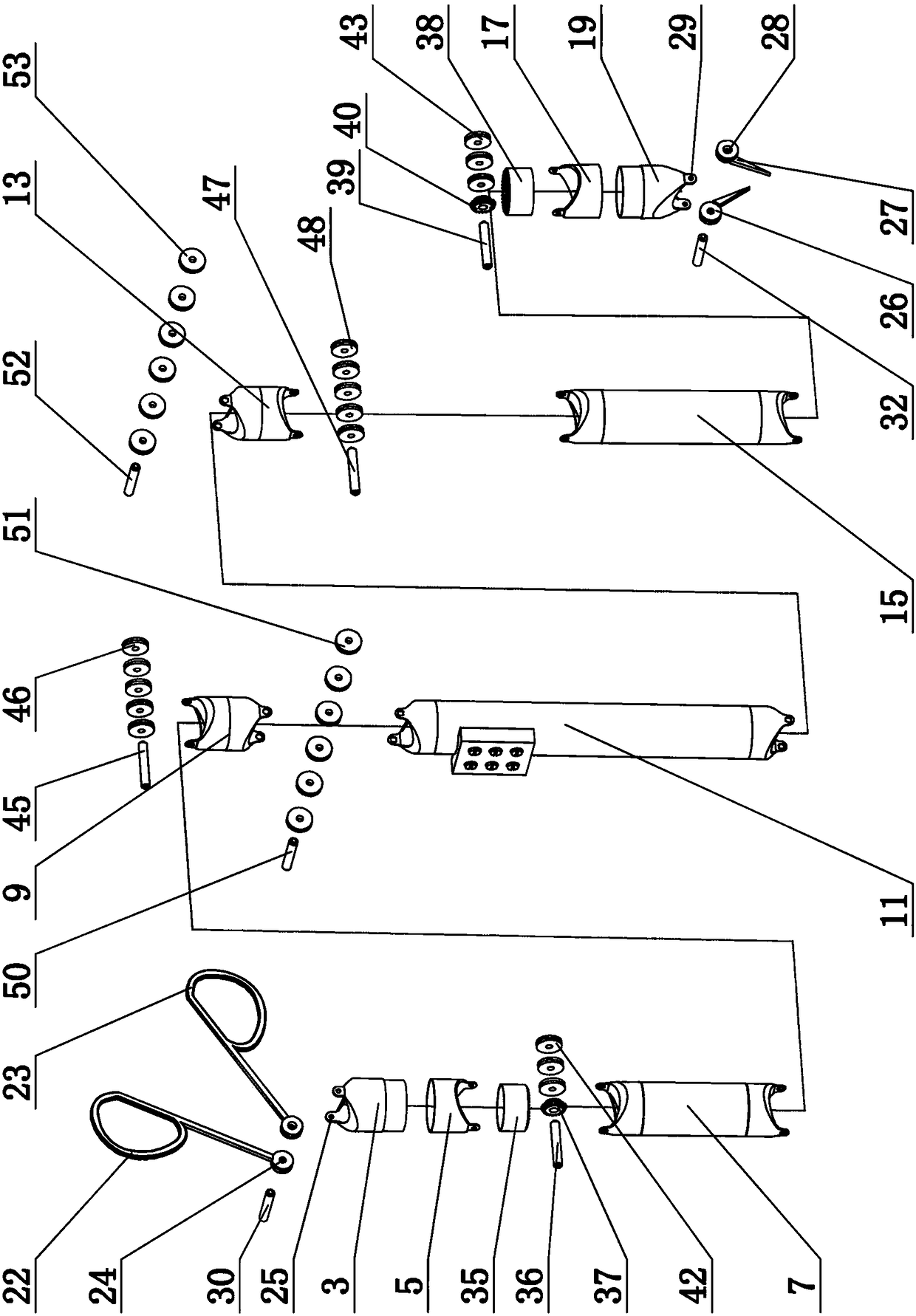
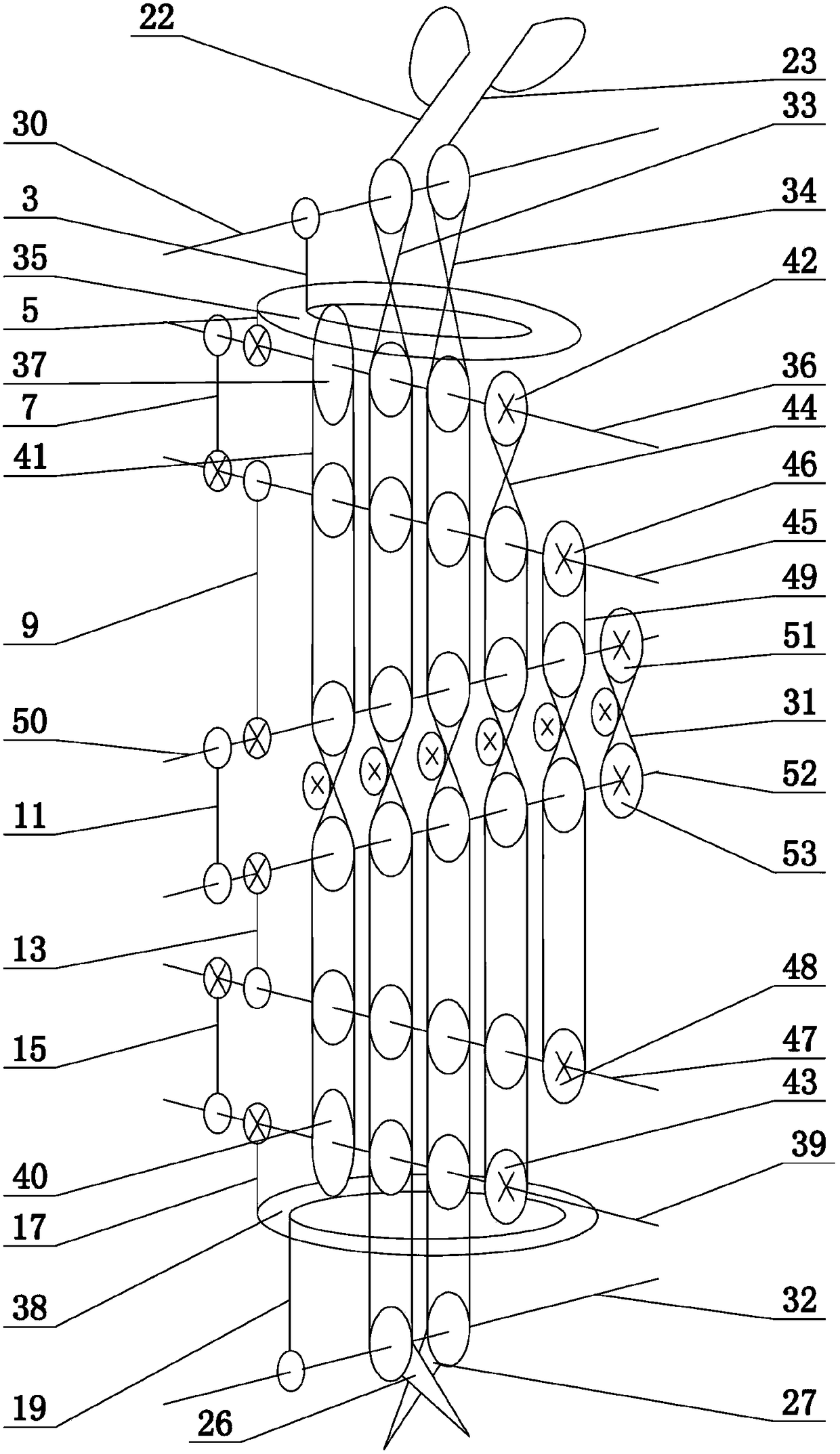
[0032] Such as figure 1 , figure 2 , image 3 , Figure 4As shown, a minimally invasive surgical tool for a new type of minimally invasive surgical robot system, including handle 1, joint I2, rod I3, joint II4, rod II5, joint III6, rod III7, joint IV8, rod IV9, joint V10, rod V11, joint VI12, rod VI13, joint VII14, rod VII15, joint VIII16, rod VIII17, joint IX18, rod IX19, joint X20 and actuator 21, rod I3, rod II5, rod III7, rod IV9 , rod V11, rod VI13, rod VII15, rod VIII17, and rod IX19 are all hollow rods, and the actuator 21 is surgical scissors or surgical forceps or surgical clips or tweezers, and the handle 1 includes a left handle 22 and a right handle 23. The lower ends of the left handle 22 and the right handle 23 are provided with a round hole I24, and the upper end of the rod I3 is provided with a support hole I25. After the handle 1 and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More