Novel minimally invasive surgical tool for minimally invasive surgical robot system
A robotic system, minimally invasive surgery technology, used in surgical robotics, surgery, medical science, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
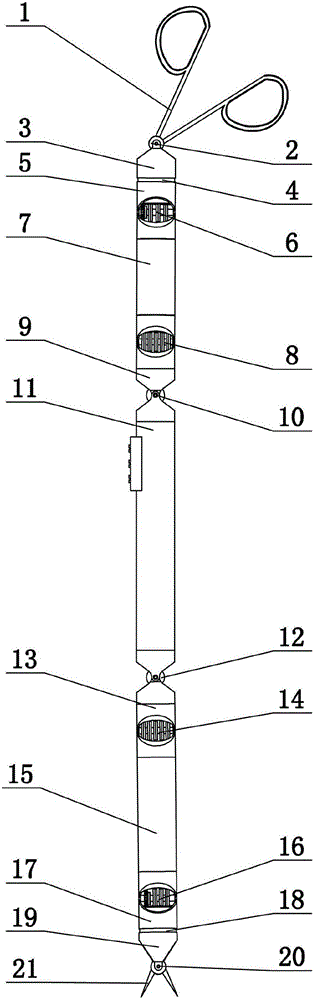
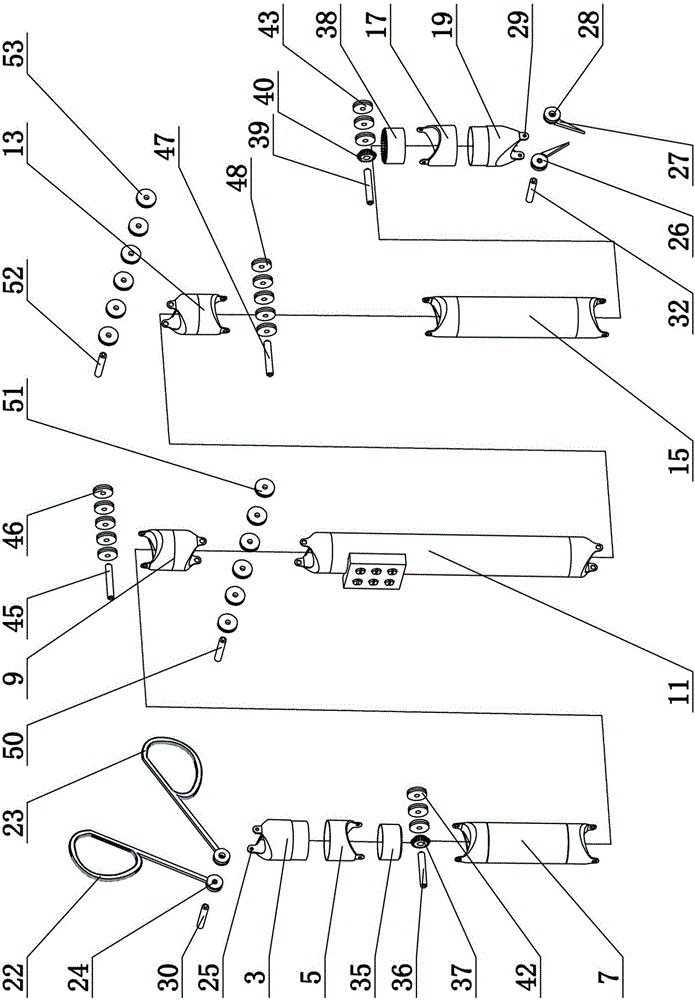
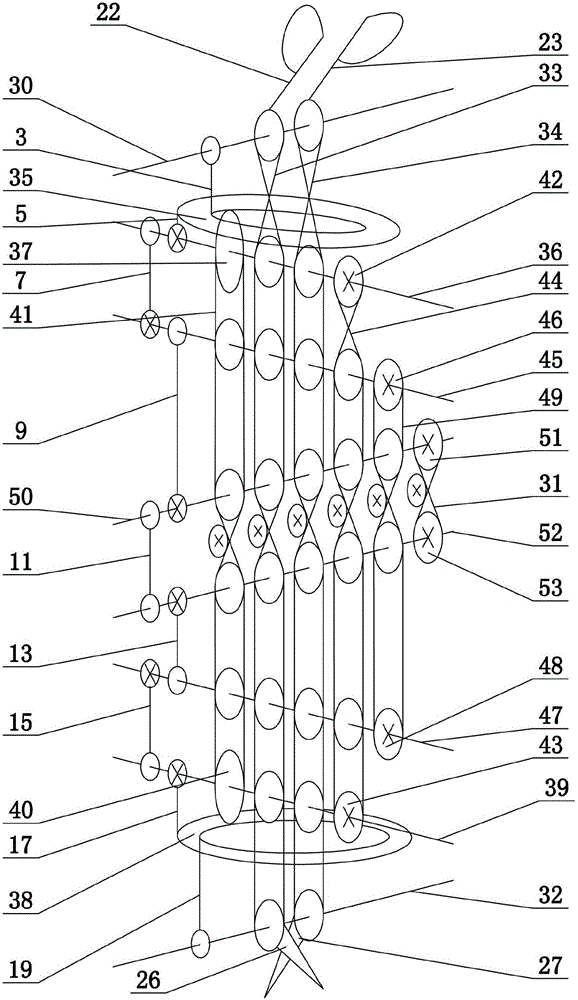
[0035] The lower end of the rod III7 and the upper end of the rod 7 9 via a shaft III45 hinge, and the joint IV8 is formed after hinged.Hive, joint ⅶ14 after hinged, the shaft ⅵ47 is connected to the fixed connection with a shaft -drive wheel 48, the shaft III driver 46 with the axis ⅵ drive wheel 48 through the keyThe axis 47 axis is parallel set, the axis III45 axis is parallel to the axis of the axis Ⅱ 36, and the wire rope ⅴ49 realizes the linkage between the joint IV 8 and the joint ⅶ14, and the mirror of the handle 1 and the actuator 21 move to X.
[0036] The lower end of the rod 与 9 and the upper end of the rod 9 11 via a shaft IV 50 hinge, forming an joint ⅴ10 after hinged, and a shaft ⅳ drive wheel 51 on the fixed connection on the fixed connection through the key.After the formation of joint ,12, the axis ⅴ52 is connected to the fixed connection with a fixed connection through the key, the axis IV driver 51 is connected to the cross -steel wire rope ⅵ 31 through the cro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More