

Bionic four-foot robot hind limb with tensegrity structure
A tensegrity structure, quadruped robot technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of robot motion failure, leg joint failure, etc., to improve stability and service life, improve motion energy efficiency, eliminate Effects of wear and impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
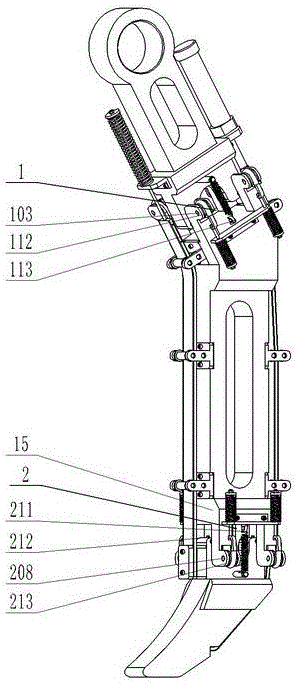
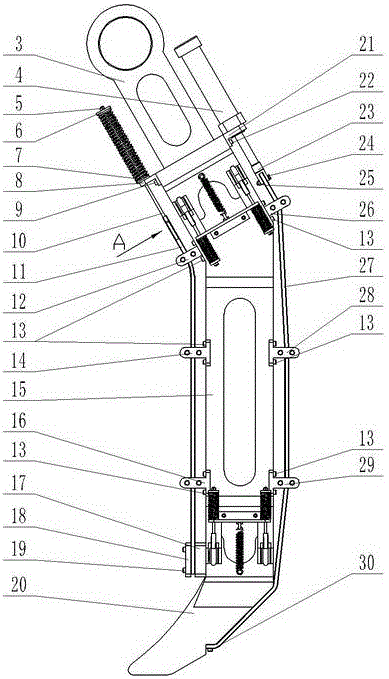
[0022] see figure 1 , figure 2 , image 3 and Figure 4 As shown, this embodiment includes a knee joint 1 , an ankle joint 2 , a first leg member 3 , a second leg member 15 , and a third leg member 20 .
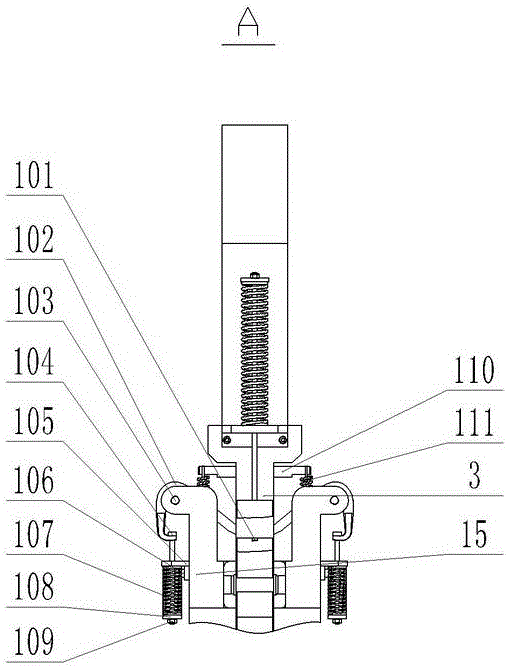
[0023]The knee joint 1 is composed of a first set screw 101, a first drag cable 102, a first pin 103, a first pull rod 104, a first spring support 105, a first screw 106, a first compression spring 107, a first pad Sheet 108, first nut 109, first spring hanger 110, first extension spring 111, first pulley 112, and first eyebolt 113. Wherein, a pair of first stay cables 102 passes through the bottom of the first leg member 3, and the relative position of the first stay cable 102 and the first leg member 3 is guaranteed by a pair of first set screws 101. The pulley 112 is symmetrically arranged on the top of the second leg member 15 through the four first pins 103 , and guides and supports the first cable 102 . Both ends of the first cable 102 cross the first pulley 112 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More