A particle filter-based map matching positioning method and system
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A map matching and particle filter technology, applied in navigation, instrumentation, surveying and navigation, etc., can solve the problem of poor positioning accuracy and achieve the effect of improving positioning accuracy
Active Publication Date: 2019-12-17
北京羲和科技有限公司
View PDF2 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0005] In view of the above technical problems, the present invention provides a particle filter-based map matching and positioning method and system. The particle filter method is used to build a particle cloud based on the indoor environment map based on the positioning solution and its error, and then update the particle cloud through particle weight adjustment. In this way, the positioning solution is obtained, the indoor positioning is realized, and the positioning accuracy is improved; the indoor positioning through the PDR algorithm is avoided, because of its large error, the problem of poor positioning accuracy
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
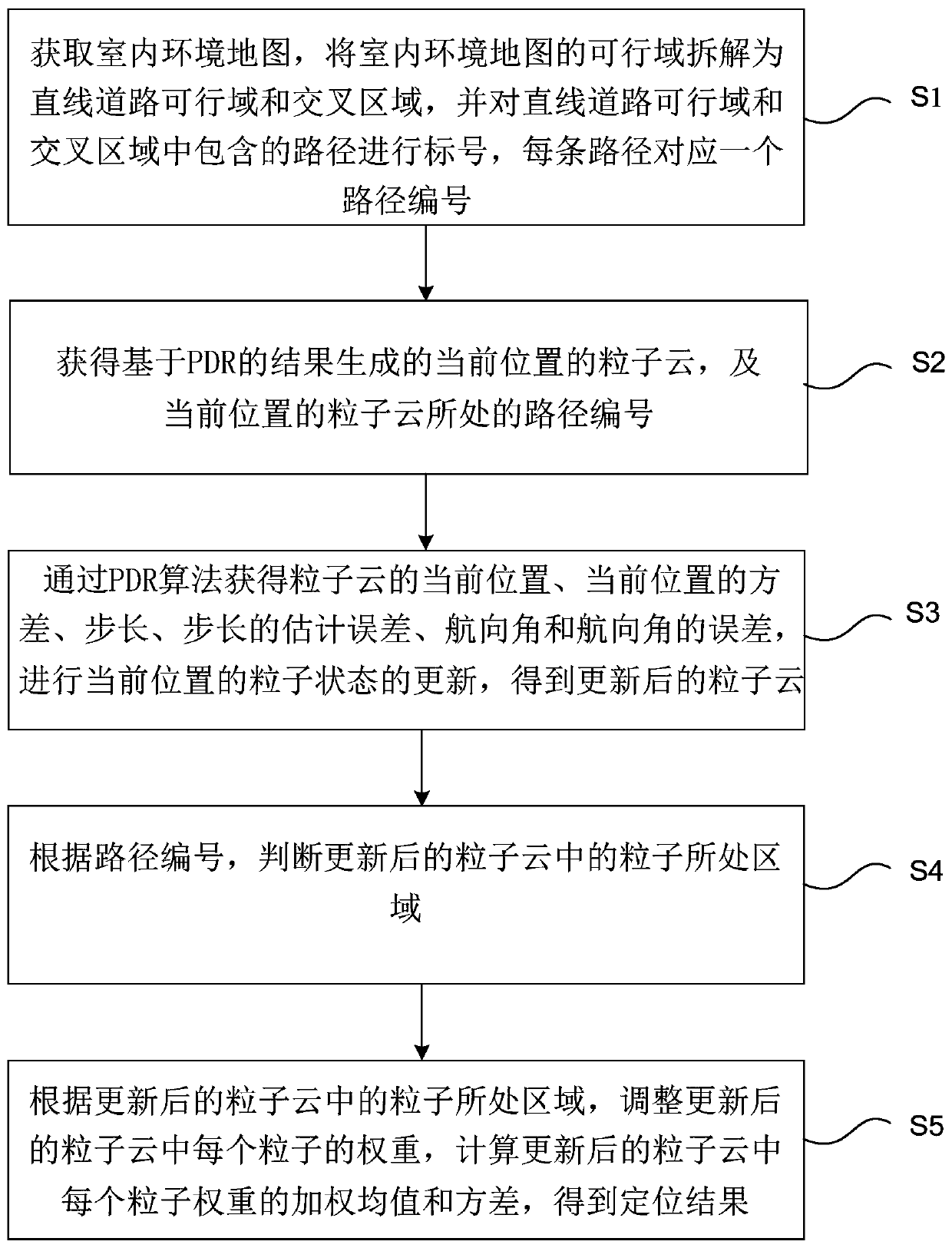
[0062] figure 1 Shows a flowchart of a map matching positioning method based on particle filtering provided by the first embodiment of the present invention; figure 1 As shown, Embodiment 1 of the present invention provides a map matching positioning method based on particle filtering, including:
[0063] Step S1, obtaining an indoor environment map, disassembling the feasible region of the indoor environment map into a feasible region of a straight road and an intersection region, and labeling the paths included in the feasible region and the intersection region of the straight road, and each path corresponds to a path number;
[0064] Step S2: Obtain the particle cloud at the current position generated based on the result of the PDR, and the path number where the particle cloud at the current position is located;
[0065] Step S3: Obtain the current position of the particle cloud, the variance of the current position, the step length, the estimated error of the step length, the head...
Embodiment 2
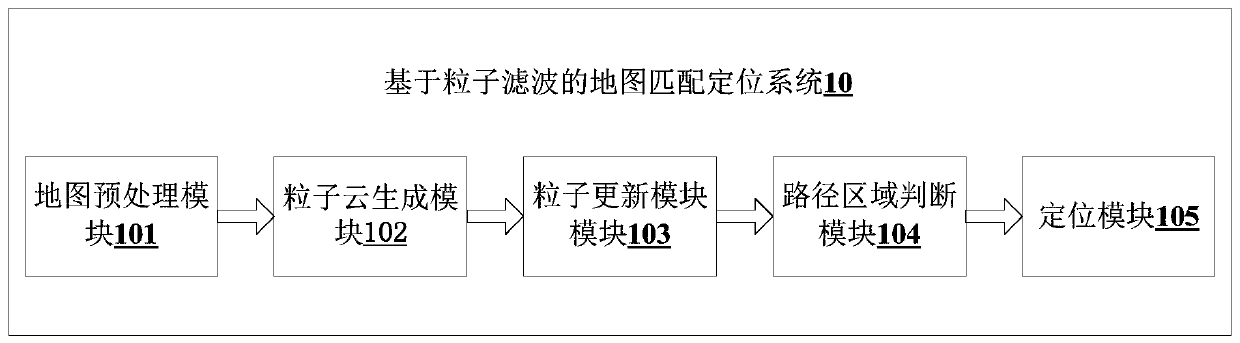
[0097] figure 2 Shows a schematic diagram of a map matching positioning system based on particle filtering provided by the second embodiment of the present invention, such as figure 2 As shown, the second embodiment of the present invention provides a map matching positioning system 10 based on particle filtering, including:
[0098] The map preprocessing module 101 is used to obtain an indoor environment map, disassemble the feasible region of the indoor environment map into a feasible region of a straight road and an intersection region, and label the path included in the feasible region of the straight road and the intersection region, each path Correspond to a path number;
[0099] The particle cloud generation module 102 is used to obtain the particle cloud at the current position generated based on the result of the PDR, and the path number where the particle cloud at the current position is located;
[0100] The particle update module 103 is used to obtain the current posi...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides a map matching and locating method and system based on particle filter. The method comprises the following steps: disintegrating a feasible domain of an indoor environmental map into a rectilinear road feasible region and a cross region, and numbering paths contained in the regions; acquiring a particle cloud of a current location generated according to a PDR result and a number of the path at which the particle cloud of the current location is located; acquiring the current location of the particle cloud, variance of the current location, a step length, an estimated error of the step length, a course angle and an error of the course angle, updating a particle state, and obtaining the updated particle cloud; and according to the number of the path, judging a region in which a particle in the updated particle cloud is located, adjusting a weight of each particle in the updated particle cloud, and obtaining a locating result. By adopting the particle filter method, the particle cloud is established for the indoor environment map based on a locating solution and the error of the locating solution, and the locating solution is obtained in a way of adjusting and updating the particle cloud by virtue of the particle weight, so that the indoor location is realized, and the locating precision is improved.
Description
Technical field [0001] The invention relates to the field of indoor positioning, in particular to a map matching positioning method and system based on particle filtering. Background technique [0002] With the development of wireless positioning technology and people's continuous pursuit of quality of life, positioning needs extend from outdoor to indoor. Indoor location information gradually plays an important role in daily life. Outdoors are mainly served by GNSS, while indoors are blocked by walls. Generally, indoor GNSS signals are weak or unreceivable, and indoor positioning services cannot be provided. Therefore, indoor positioning methods are widely studied and concerned. [0003] With the development of Location Based Service (LBS) in full swing today, in the existing technology, the indoor positioning technology of mobile phone PDR based on sensor data is usually used. PDR is called pedestrian dead reckoning, which is mainly calculated to obtain indoor walking The locat...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More