

Magnetic belt guided AGV tracking control method based on auto-disturbance-rejection control
A technology of active disturbance rejection control and control method, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of limited external and system interference anti-interference ability, rapid response and control Problems such as excessive overshoot and left and right oscillation of AGV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings.
[0071] refer to Figure 1 ~ Figure 3 , a kind of tape guidance AGV tracking control method based on active disturbance rejection control, described method comprises the following steps:
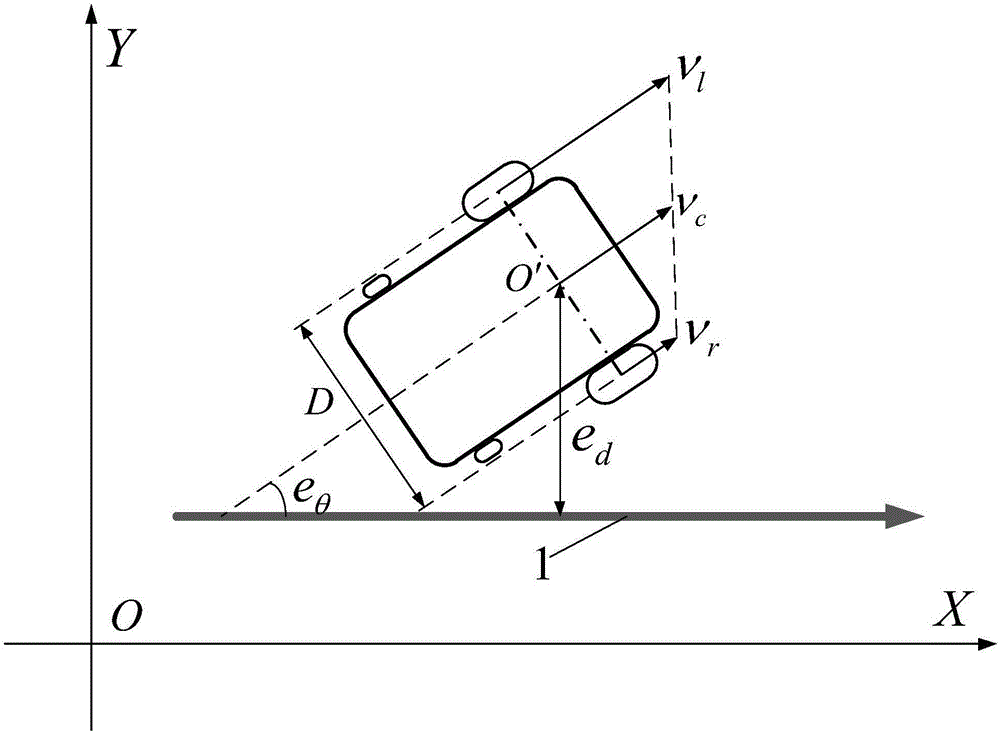
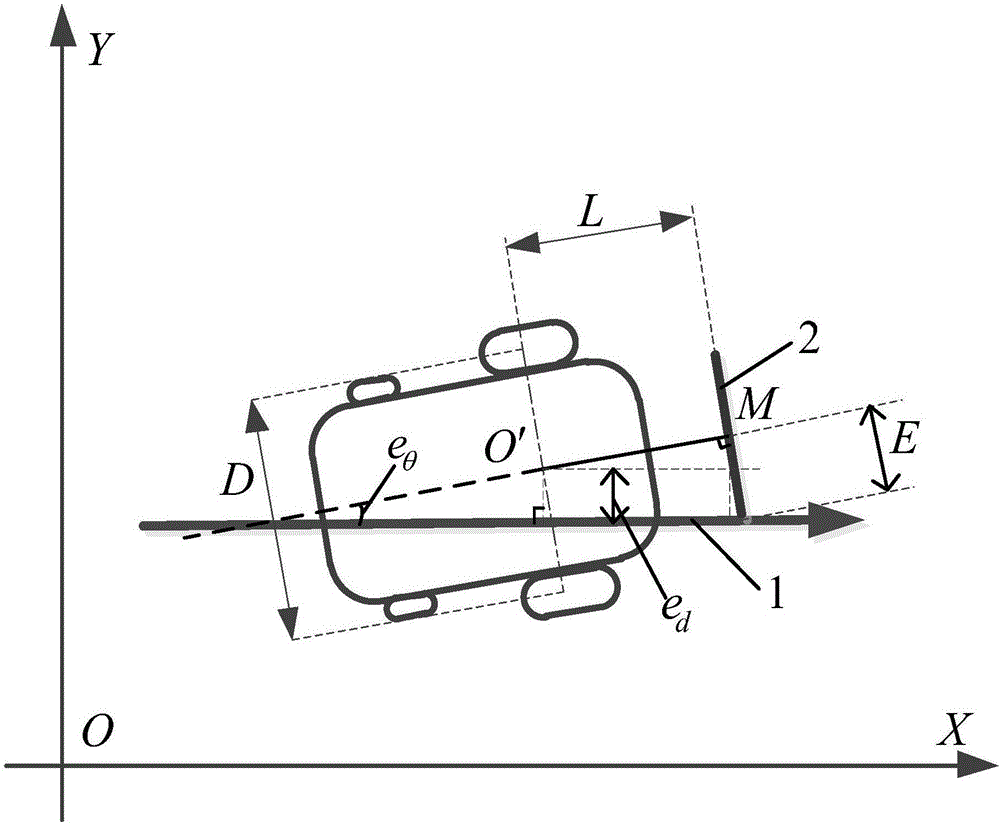
[0072] Step 1) Taking the four-wheeled car as the research object, the two front wheels are used as driving wheels to realize differential steering, and the two rear wheels are used as driven wheels to play a supporting role. Assuming that the axis of the driving wheel of the trolley is the center of mass of the trolley, according to the motion characteristics of the mobile robot, the tracking model of the tape-guided AGV can be obtained as:
[0073]
[0074] As long as there is a deviation E in the magnetic guidance sensor, the system can convert the speed difference of the driving wheel into the speed of the two driving wheels of the trolley through the control input u, and then...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More