

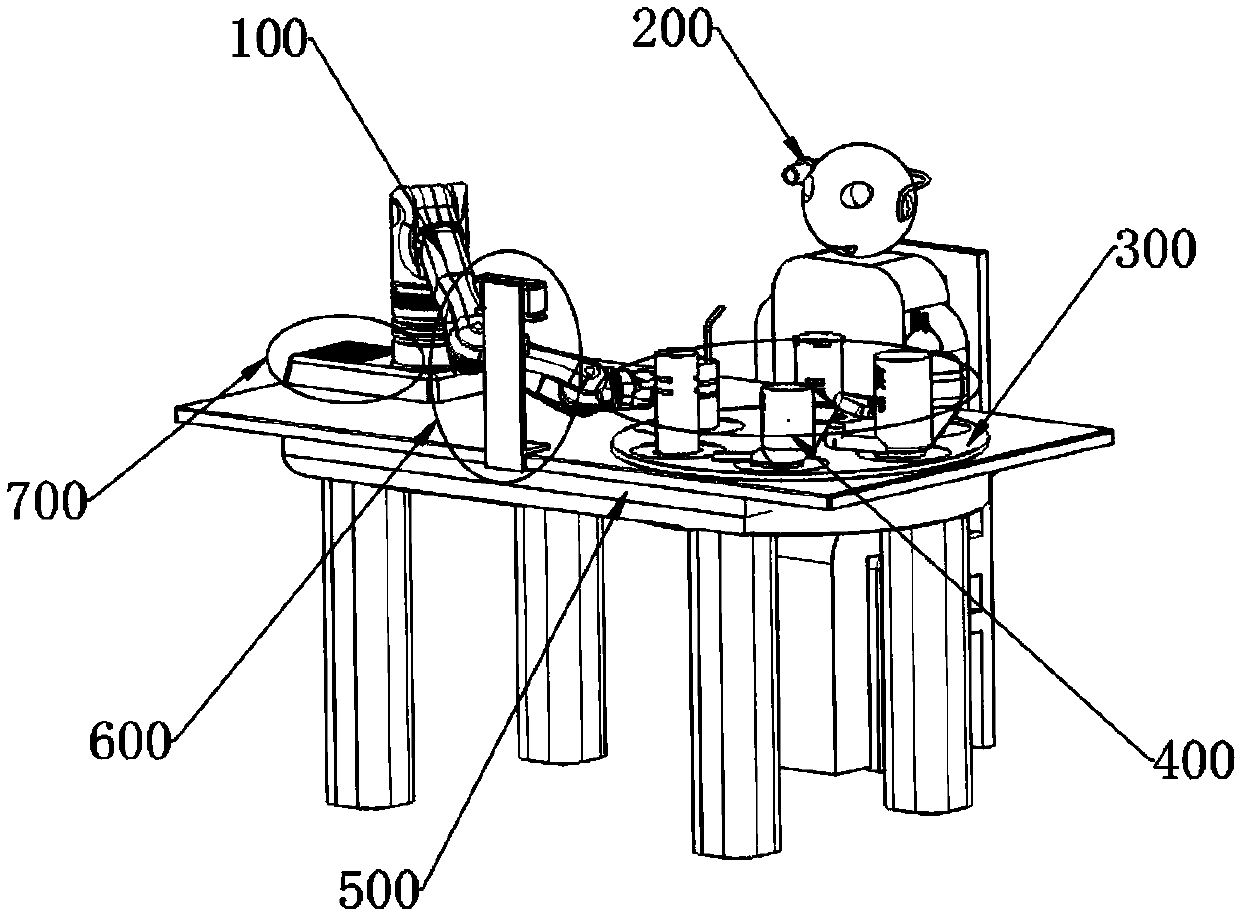
Manipulator system and working method for assisting upper limb disabled people to eat and drink
A technology for manipulators and catering, applied in the directions of manipulators, manufacturing tools, etc., can solve the problems of difficulty, difficult to pick up food, limited styles, etc., to achieve the requirements of reducing the complexity of operating actions, easy to pick up food, and stable feeding.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
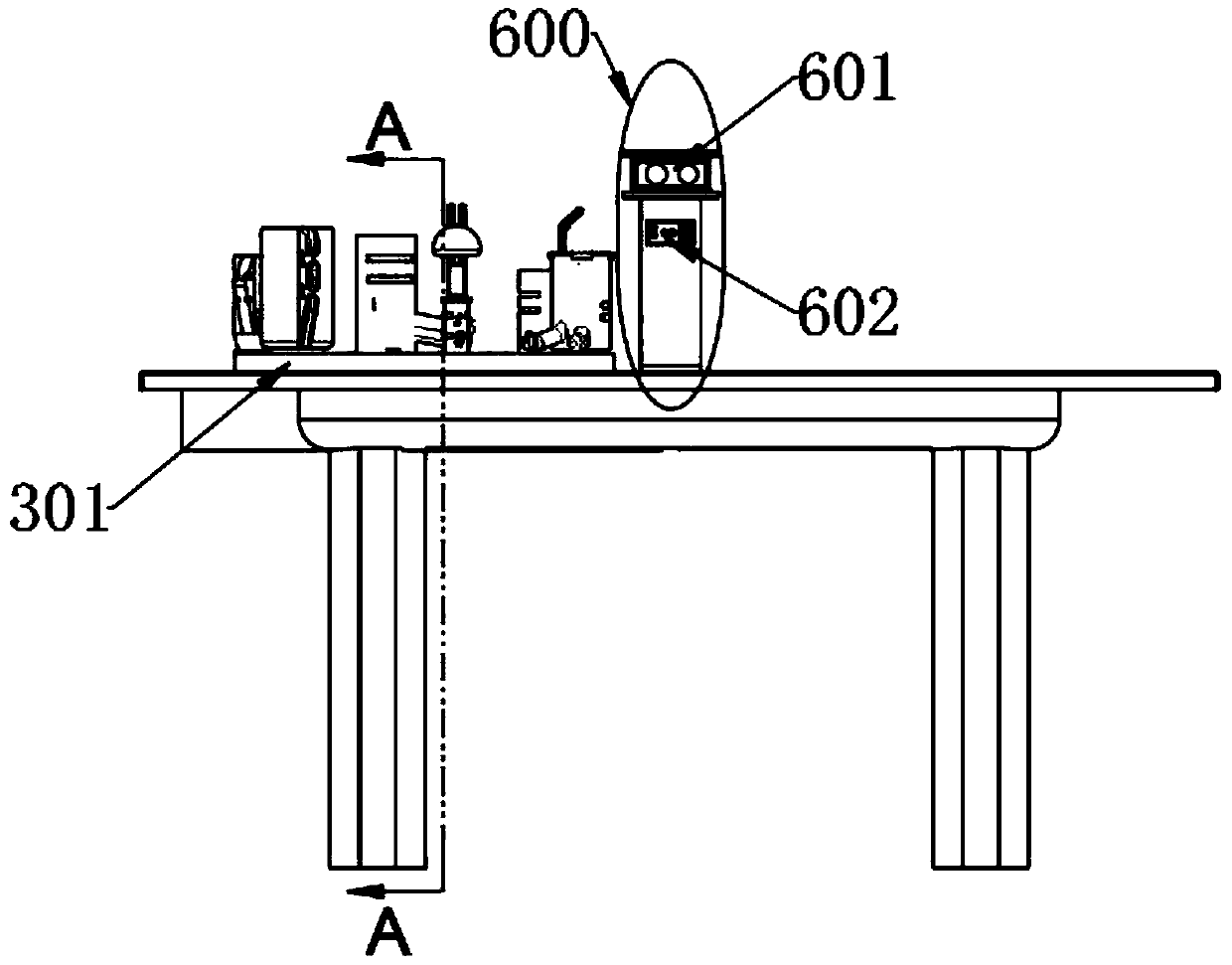
[0055] Embodiment 1 is the implementation process of the aided person feeding steamed buns with the help of the system and method of the present invention (see Figure 6 and Figure 9 ).
[0056] Step 1: Firstly, the steamed buns are processed and processed into large lumps of food, and they are placed in the feeder 405 dedicated to large lumps of food in advance
[0057] Step 2: When the recipient sends out the voice command "No. 5", the command input device 200 recognizes the voice command signal and transmits the signal to the controller 700 .
[0058] Step 3: After the controller 700 receives the "No. 5" command, it controls the servo driver 302 in the turntable system to drive the turntable 301 to rotate, and rotates the special feeder 405 with the steamed buns on it to the "working position" close to the manipulator 100.
[0059] Step 4: The controller 700 recognizes that the special feeder 405 carrying steamed buns enters the "working position", so that the "No. 5" te...
Embodiment 2
[0066] Embodiment two is an example of the implementation process in which the recipient eats large granular food by means of the system and method of the present invention (see Figure 7 and Figure 9 ).
[0067] Step 1: First, put the large granular food in the special feeder 402 for large granular food
[0068] Step 2: When the recipient sends out the voice command "No. 2", the command input device 200 recognizes the voice command signal and transmits the signal to the controller 700 .
[0069] Step 3: After the controller 700 receives the "No. 2" command, it controls the servo driver 302 in the turntable system to drive the turntable 301 to rotate, and rotates the No. 402 special feeder containing large granular food to the "working position" close to the manipulator 100 "superior.
[0070] Step 4: The controller 700 recognizes that the No. 402 special feeder containing large granular food arrives at the "working position", and the "No. 2" teaching reproduction and path...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More