Inner support grabbing and mold pressing manipulator for cylindrical inner wall workpiece
A technology of cylindrical surfaces and manipulators, applied in the directions of manipulators, metal processing, manufacturing tools, etc., can solve the problems of non-assisted positioning and assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
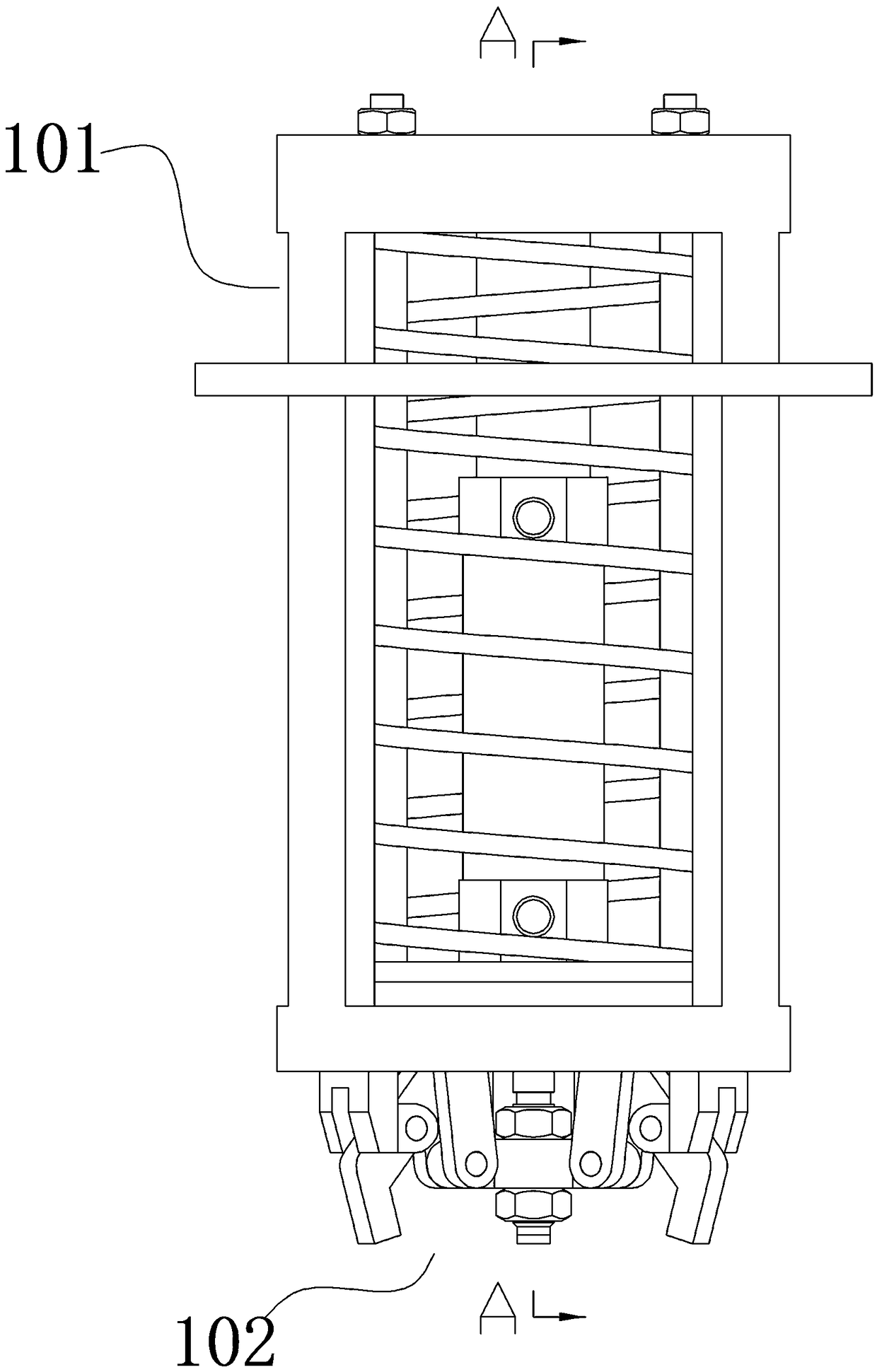
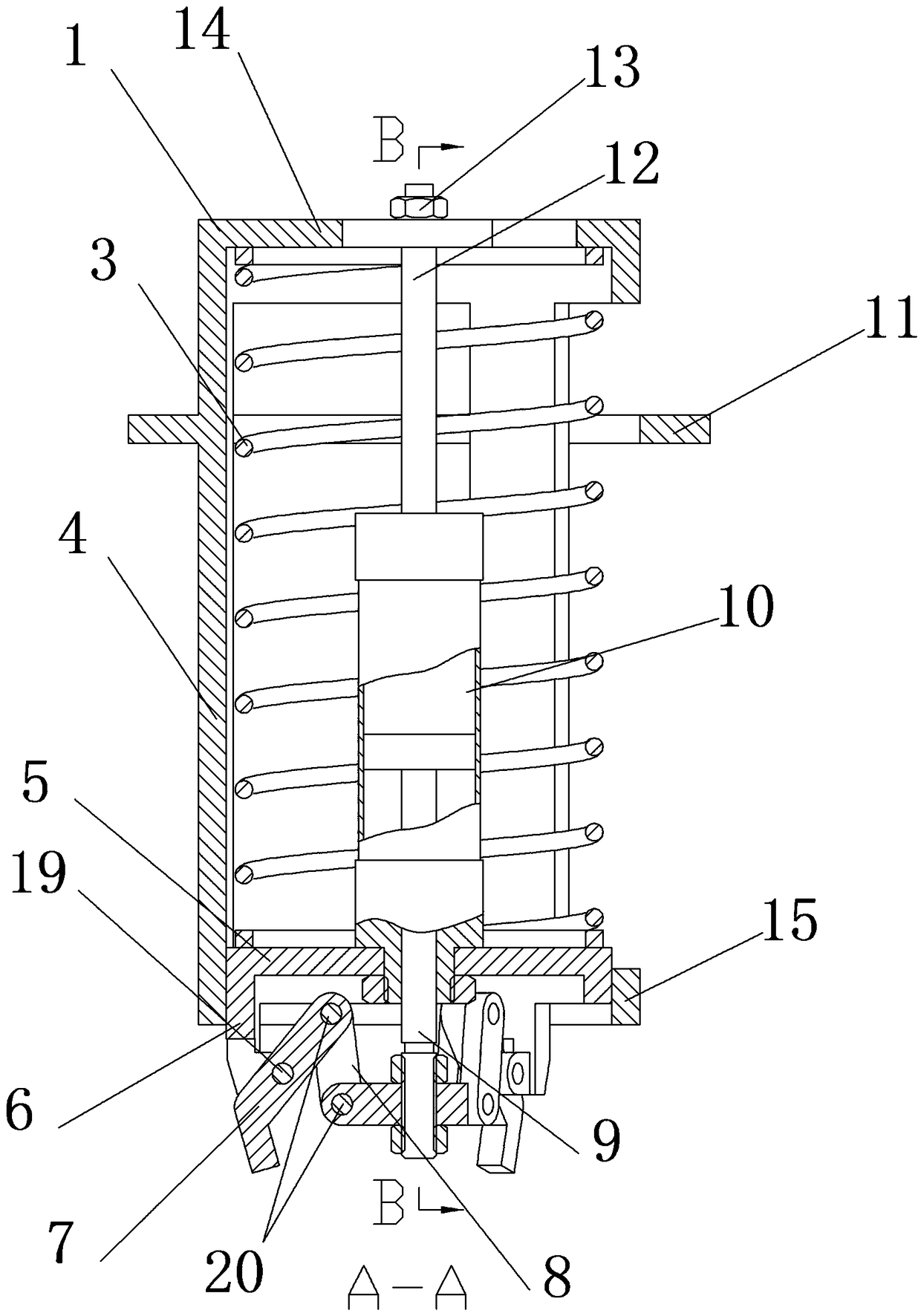
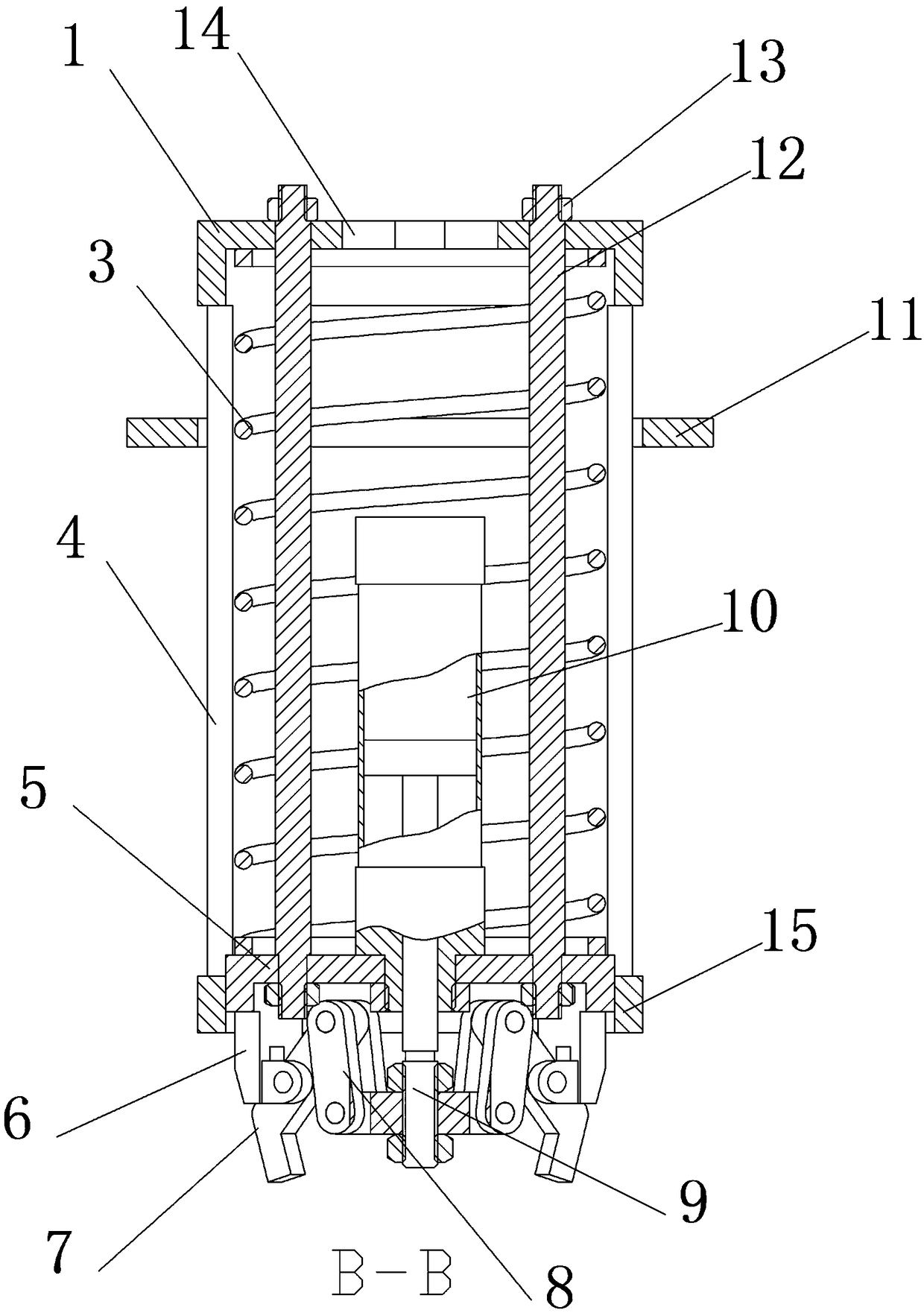
[0037] Embodiment: An inner-supported grasping and mold-pressing manipulator for cylindrical inner wall workpieces, characterized in that the manipulator includes an external cylindrical sleeve and a grasping device installed in the sleeve,
[0038] The grabbing device includes a disc-shaped main body matching the diameter of the inner cylindrical surface of the sleeve; at least three same inner support mechanisms arranged on the lower surface of the disc-shaped main body and evenly distributed; installed on the disc The middle part of the upper surface of the disc-shaped main body, and passes through the disc-shaped main body to its lower surface, and is connected to the telescopic linear motion driver of the inner support mechanism; the running direction of the movable part of the linear motion driver is the same as the axial direction of the disc-shaped main body; the The disc-shaped main body is set inside the sleeve and can slide along the inner surface of the sleeve; on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com