

3D target identification method based on sphere space
A recognition method and a technology of three-dimensional objects, which are applied in three-dimensional object recognition, character and pattern recognition, instruments, etc., can solve problems such as complex calculations and lack of stability, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
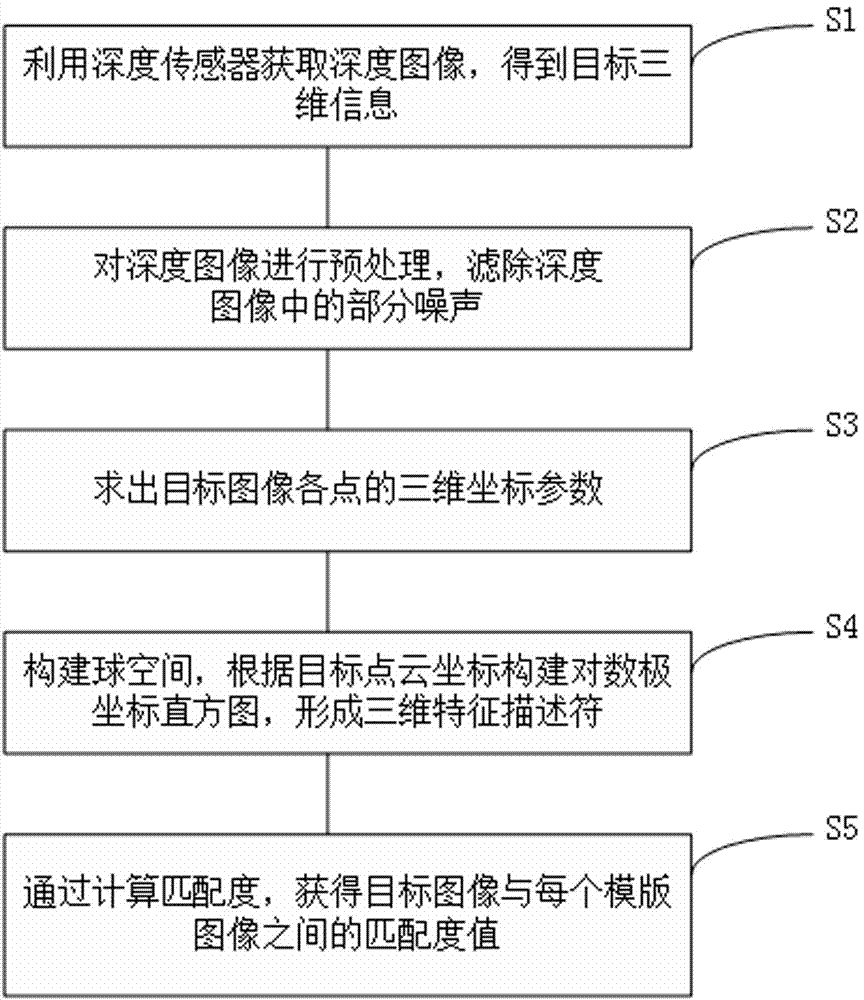
[0029] Embodiment one: see figure 1 Shown, a kind of three-dimensional object recognition method based on spherical space, described method comprises the following steps:
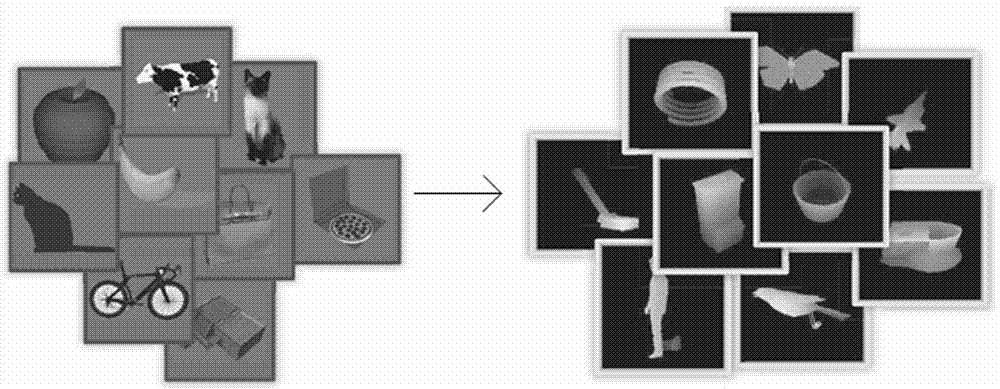
[0030] S1. Use the depth sensor to obtain the target depth image, and obtain the three-dimensional information of the target, such as figure 2 shown;
[0031] S2. Preprocessing the depth image to filter out part of the noise in the depth image;
[0032] S3, calculating the three-dimensional coordinate parameters of each point of the target image;
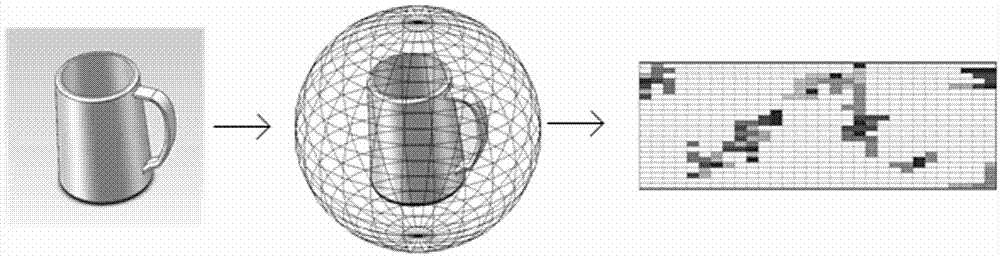
[0033] S4. Construct a spherical space, construct a logarithmic polar coordinate histogram according to the target point cloud coordinates, and form a three-dimensional feature descriptor, such as image 3 As shown, from left to right are the three-dimensional information map of the target, the schematic diagram of the spherical space division, and the logarithmic polar coordinate histogram;
[0034] Step S4 specifically includes:
[0035] S41. Directly con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More