

Object Motion Characteristic Reconstruction Method Based on Random Sampling Consistency
A motion characteristic and random sampling technology, applied in the field of 3D scanner reconstruction, can solve the problems of missing data, inefficiency, cumbersome manual interaction, etc., and achieve the effect of avoiding time overhead
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
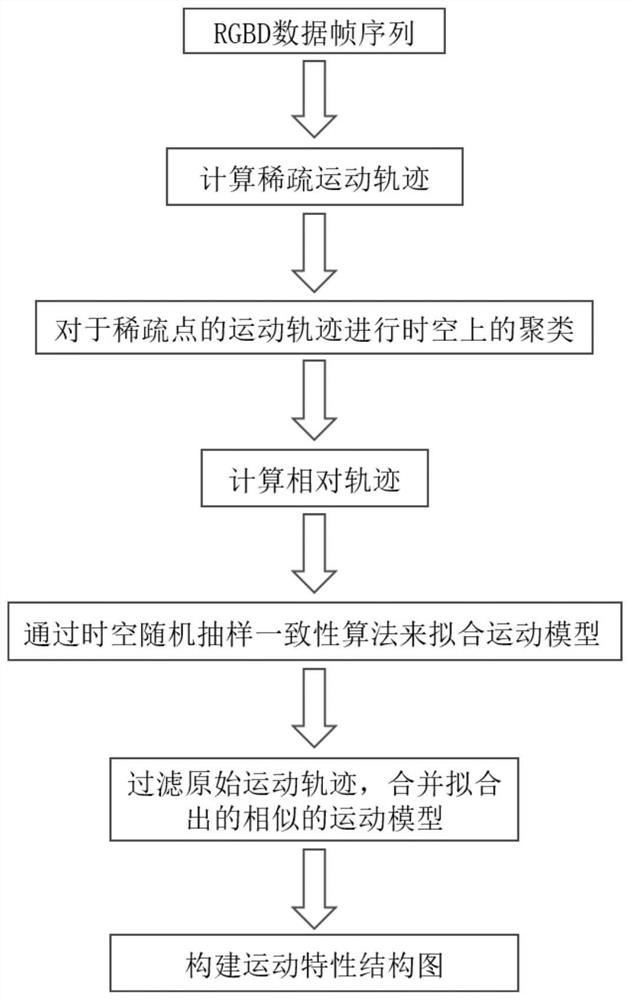
[0064] First, use figure 1 The process flow of the method for reconstructing the motion characteristics of dynamic objects based on the random sampling consensus algorithm of the present invention is described, figure 1 Be the schematic flow sheet of this method of the present invention, its step comprises:
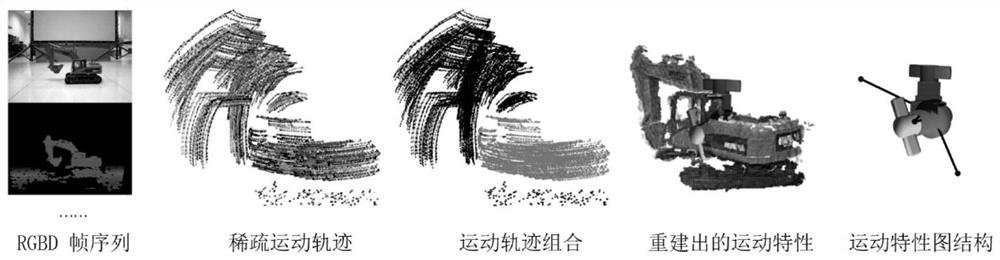
[0065] Step (1): According to the continuous RGB-D data frames acquired by the 3D scanner, find the sparse corresponding points of every two frames of data, and then calculate the sparse motion trajectory across all frames.
[0066] Step (2): Perform spatio-temporal clustering on the sparse motion trajectories, cluster the trajectories with consistent motion into one class, and then obtain a series of trajectory combinations, and re-express each motion trajectory combination with a single motion trajectory.
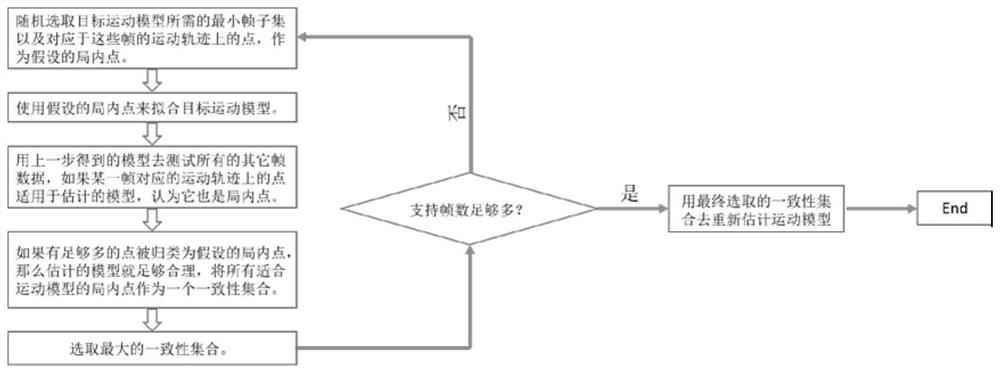
[0067] Step (3): For each trajectory ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More