

A Space Robot Collision Avoidance Method Based on Multiple Control Points
A space robot and control point technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of increased calculation amount and complicated constraint process, and achieve the effect of smooth angular velocity and avoid discontinuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
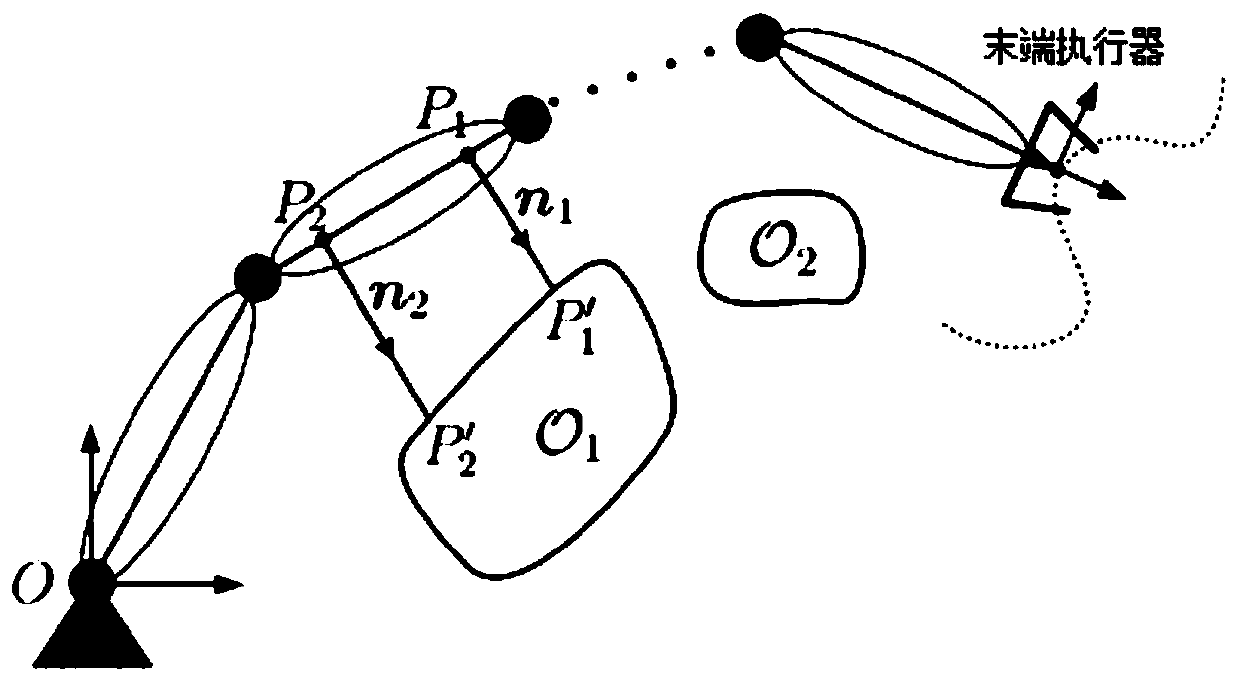
[0059] Based on multiple control points, the invention proposes a space robot collision avoidance method suitable for dynamic environments. Considering the non-convex characteristics of obstacles, with the help of the concept of Voronoi area, a more accurate collision avoidance constraint is established during collision detection. Based on multiple control points, the vibration problem caused by the jump of a single control point can be suppressed, and the angular velocity of the joints of the manipulator is smooth during trajectory planning. The specific collision avoidance method is as follows.
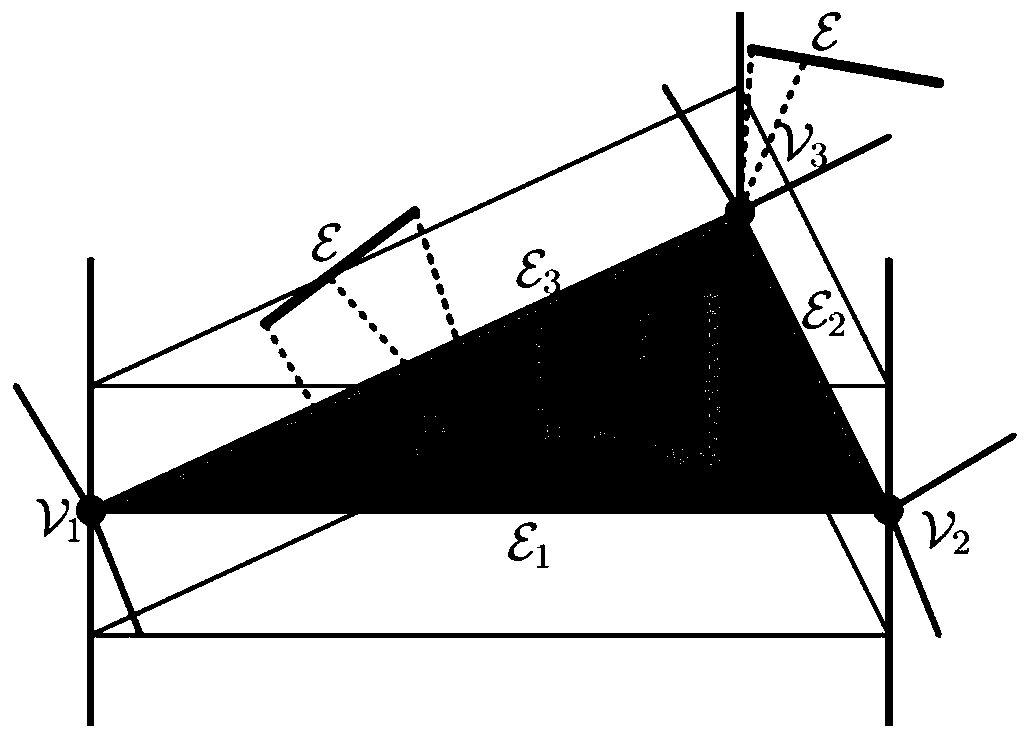
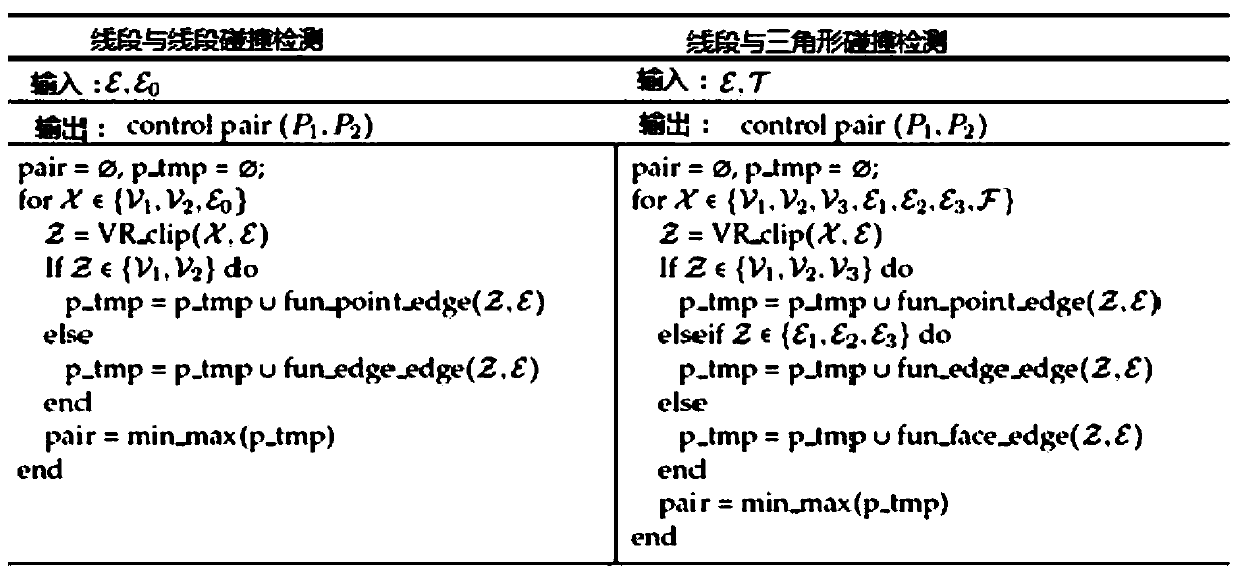
[0060] Step 1: Process the obstacle into a non-convex polyhedron composed of triangular faces, and describe the collision detection algorithm between the line segment and the triangle, such as fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More